Bioengineering Group, CSIC, Arganda del Rey, Madrid 28500, Spain.
Sensors (Basel). 2012;12(3):3049-67. doi: 10.3390/s120303049. Epub 2012 Mar 6.
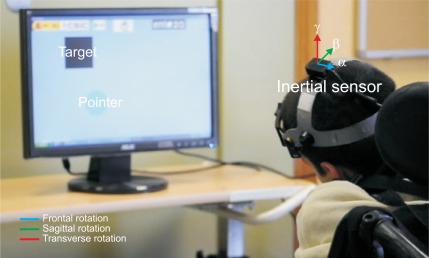
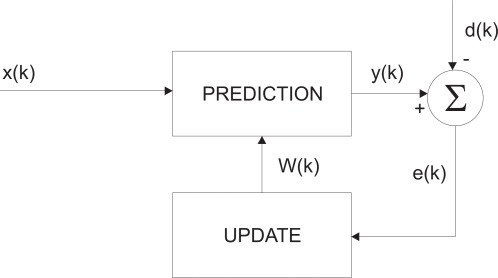
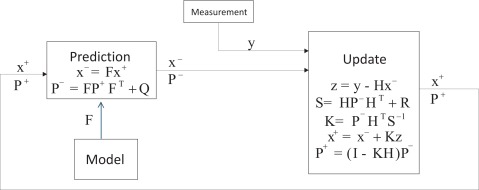
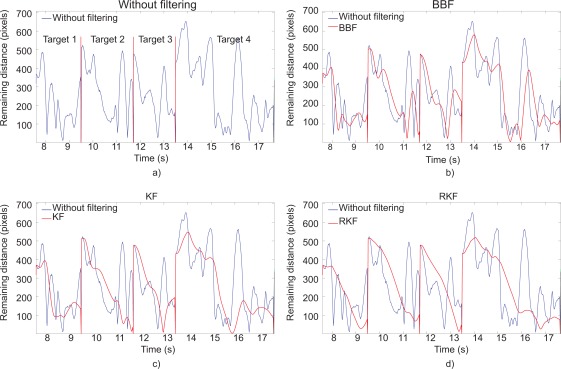
This work aims to create an advanced human-computer interface called ENLAZA for people with cerebral palsy (CP). Although there are computer-access solutions for disabled people in general, there are few evidences from motor disabled community (e.g., CP) using these alternative interfaces. The proposed interface is based on inertial sensors in order to characterize involuntary motion in terms of time, frequency and range of motion. This characterization is used to design a filtering technique that reduces the effect of involuntary motion on person-computer interaction. This paper presents a robust Kalman filter (RKF) design to facilitate fine motor control based on the previous characterization. The filter increases mouse pointer directivity and the target acquisition time is reduced by a factor of ten. The interface is validated with CP users who were unable to control the computer using other interfaces. The interface ENLAZA and the RKF enabled them to use the computer.
本工作旨在为脑瘫(CP)患者创建一个名为 ENLAZA 的高级人机接口。虽然一般来说有针对残疾人士的计算机接入解决方案,但很少有来自运动障碍社区(例如 CP)使用这些替代接口的证据。所提出的接口基于惯性传感器,以便根据时间、频率和运动范围来描述非自愿运动。这种描述用于设计一种过滤技术,以减少非自愿运动对人机交互的影响。本文提出了一种稳健的卡尔曼滤波器(RKF)设计,以便根据之前的描述来促进精细运动控制。该滤波器增加了鼠标指针的方向性,并且目标获取时间减少了十倍。该接口已通过无法使用其他接口控制计算机的 CP 用户进行了验证。ENLAZA 接口和 RKF 使他们能够使用计算机。