Hyun Jong Jin, Chun Hoon Jai, Keum Bora, Seo Yeon Seok, Kim Yong Sik, Jeen Yoon Tae, Lee Hong Sik, Um Soon Ho, Kim Chang Duck, Ryu Ho Sang, Lim Jong-Wook, Woo Dong-Gi, Kim Young-Joong, Lim Myo-Taeg
Division of Gastroenterology and Hepatology, Department of Internal Medicine, Korea University College of Medicine, Seoul, Korea.
Clin Endosc. 2012 Sep;45(3):182-8. doi: 10.5946/ce.2012.45.3.182. Epub 2012 Aug 22.
BACKGROUND/AIMS: Three-dimensional (3D) imaging is gaining popularity and has been partly adopted in laparoscopic surgery or robotic surgery but has not been applied to gastrointestinal endoscopy. As a first step, we conducted an experiment to evaluate whether images obtained by conventional gastrointestinal endoscopy could be used to acquire quantitative 3D information.
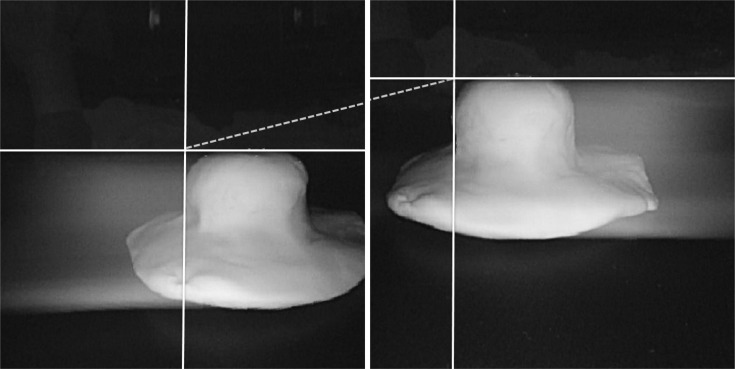
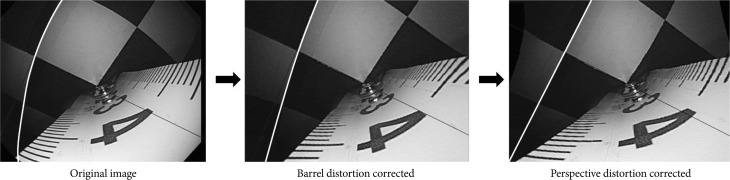
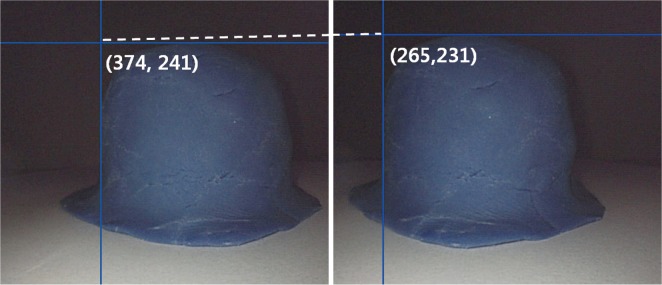
Two endoscopes (GIF-H260) were used in a Borrmann type I tumor model made of clay. The endoscopes were calibrated by correcting the barrel distortion and perspective distortion. Obtained images were converted to gray-level image, and the characteristics of the images were obtained by edge detection. Finally, data on 3D parameters were measured by using epipolar geometry, two view geometry, and pinhole camera model.
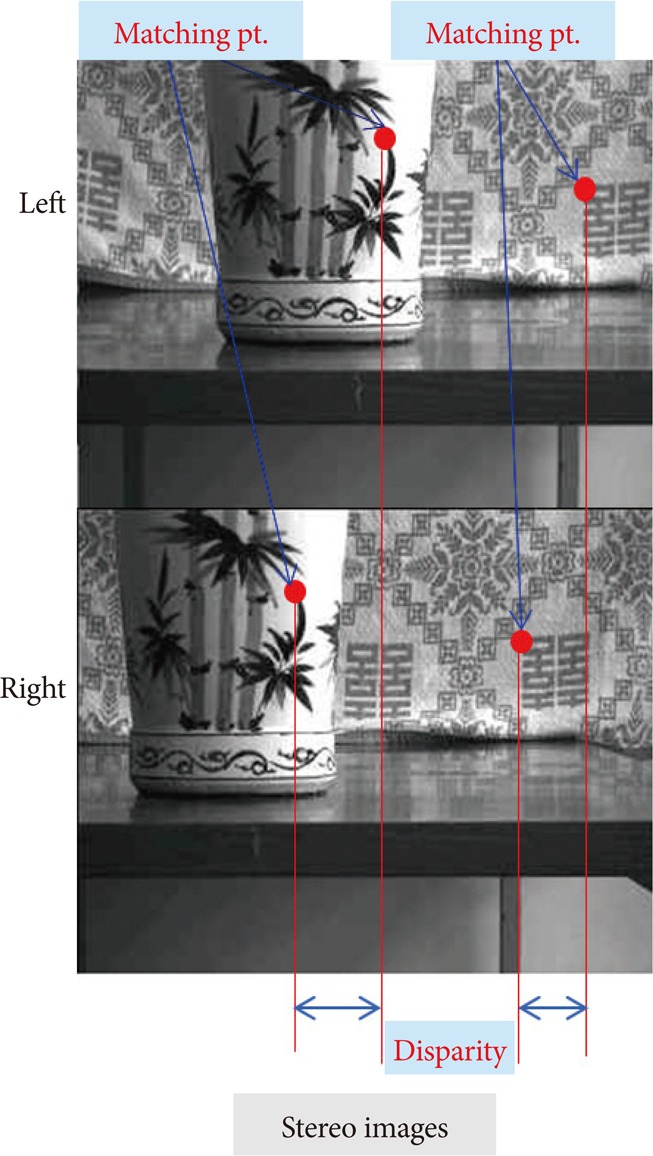
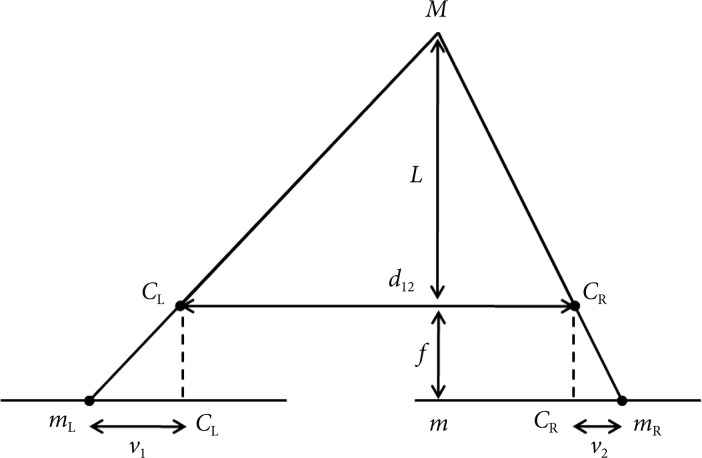
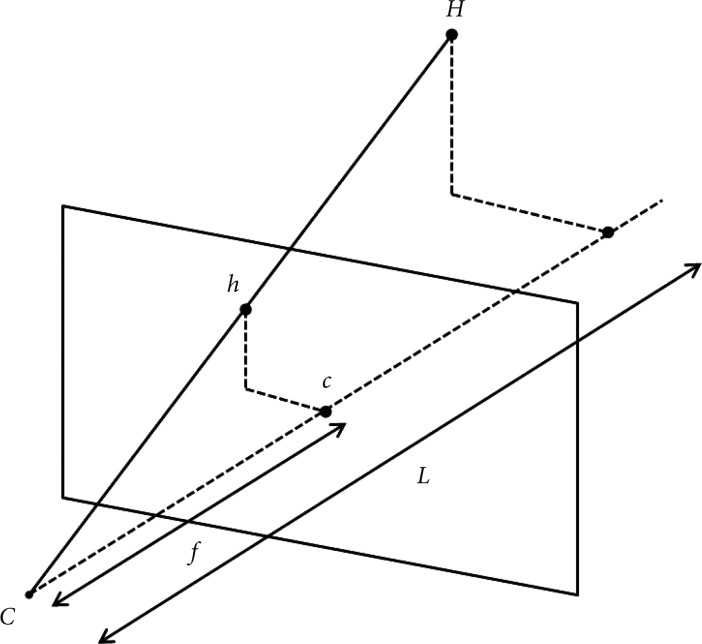
The focal length (f) of endoscope at 30 mm was 258.49 pixels. Two endoscopes were fixed at predetermined distance, 12 mm (d(12)). After matching and calculating disparity (v2-v1), which was 106 pixels, the calculated length between the camera and object (L) was 29.26 mm. The height of the object projected onto the image (h) was then applied to the pinhole camera model, and the result of H (height and width) was 38.21 mm and 41.72 mm, respectively. Measurements were conducted from 2 different locations. The measurement errors ranged from 2.98% to 7.00% with the current Borrmann type I tumor model.
It was feasible to obtain parameters necessary for 3D analysis and to apply the data to epipolar geometry with conventional gastrointestinal endoscope to calculate the size of an object.
背景/目的:三维(3D)成像正日益普及,已部分应用于腹腔镜手术或机器人手术,但尚未应用于胃肠内镜检查。作为第一步,我们进行了一项实验,以评估常规胃肠内镜检查获得的图像是否可用于获取定量3D信息。
在由粘土制成的Borrmann I型肿瘤模型中使用两台内镜(GIF-H260)。通过校正镜筒畸变和透视畸变对内镜进行校准。将获得的图像转换为灰度图像,并通过边缘检测获得图像特征。最后,使用极线几何、双目几何和针孔相机模型测量3D参数数据。
内镜在30 mm处的焦距(f)为258.49像素。将两台内镜固定在预定距离12 mm(d(12))处。在匹配并计算视差(v2-v1)为106像素后,计算出的相机与物体之间的长度(L)为29.26 mm。然后将投影到图像上的物体高度(h)应用于针孔相机模型,H(高度和宽度)的结果分别为38.21 mm和41.72 mm。从2个不同位置进行测量。在当前的Borrmann I型肿瘤模型中,测量误差范围为2.98%至7.00%。
使用常规胃肠内镜获取3D分析所需的参数并将数据应用于极线几何以计算物体大小是可行的。