PERCRO Laboratory, TeCIP Institute, Scuola Superiore Sant'Anna, Piazza Martiri della Libertà 33, Pisa 56127, Italy.
Sensors (Basel). 2012 Oct 10;12(10):13598-616. doi: 10.3390/s121013598.
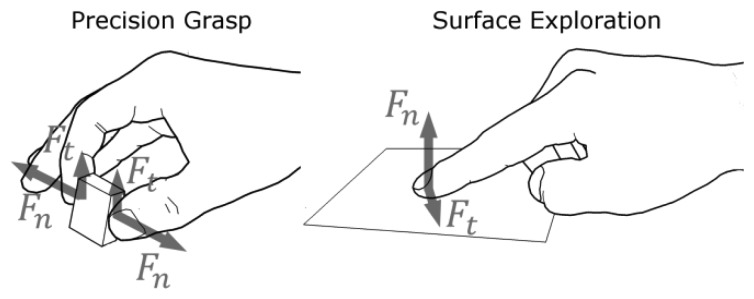
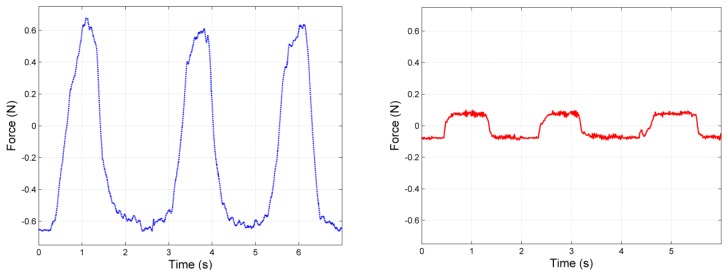
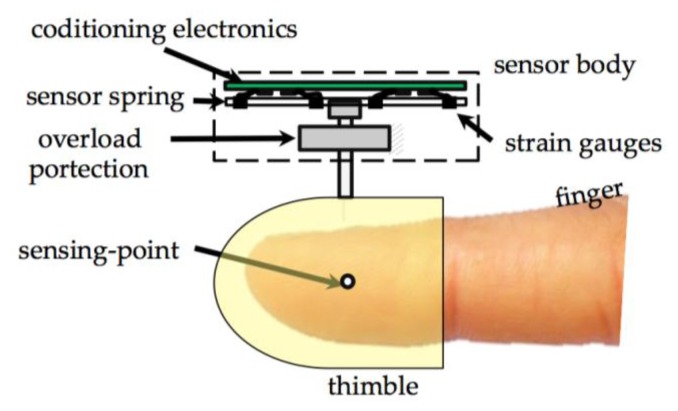
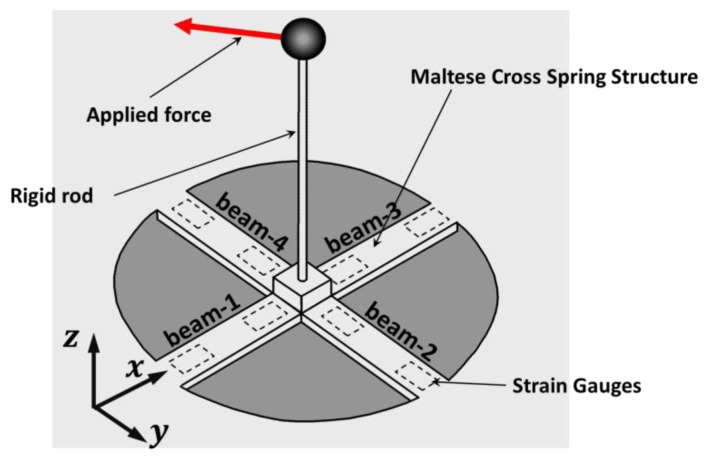
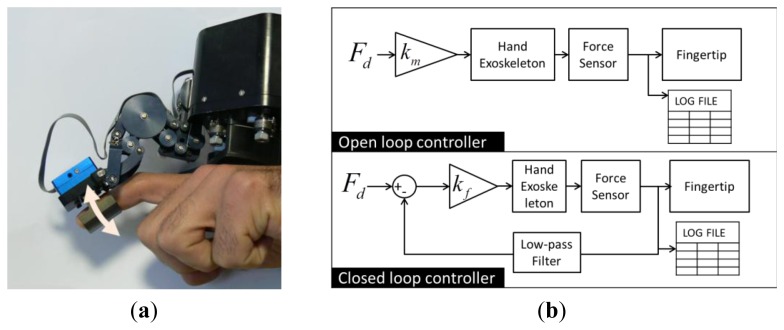
In this work we present the design process, the characterization and testing of a novel three-axis mechanical force sensor. This sensor is optimized for use in closed-loop force control of haptic devices with three degrees of freedom. In particular the sensor has been conceived for integration with a dual finger haptic interface that aims at simulating forces that occur during grasping and surface exploration. The sensing spring structure has been purposely designed in order to match force and layout specifications for the application. In this paper the design of the sensor is presented, starting from an analytic model that describes the characteristic matrix of the sensor. A procedure for designing an optimal overload protection mechanism is proposed. In the last part of the paper the authors describe the experimental characterization and the integrated test on a haptic hand exoskeleton showing the improvements in the controller performances provided by the inclusion of the force sensor.
在这项工作中,我们介绍了一种新型三轴机械力传感器的设计过程、特性和测试。该传感器经过优化,可用于具有三个自由度的触觉设备的闭环力控制。特别是,该传感器的设计目的是与双指触觉接口集成,以模拟在抓取和表面探索过程中发生的力。为了满足应用的力和布局规格,特意设计了传感弹簧结构。本文从描述传感器特征矩阵的解析模型开始,介绍了传感器的设计。提出了一种设计最佳过载保护机制的方法。在本文的最后一部分,作者描述了在触觉手套外骨骼上进行的实验特性和集成测试,展示了包含力传感器后控制器性能的提高。