Bernstein Center for Computational Neuroscience, The Third Institute of Physics, Georg-August-Universität Göttingen Göttingen, Germany.
Front Neural Circuits. 2013 Feb 13;7:12. doi: 10.3389/fncir.2013.00012. eCollection 2013.
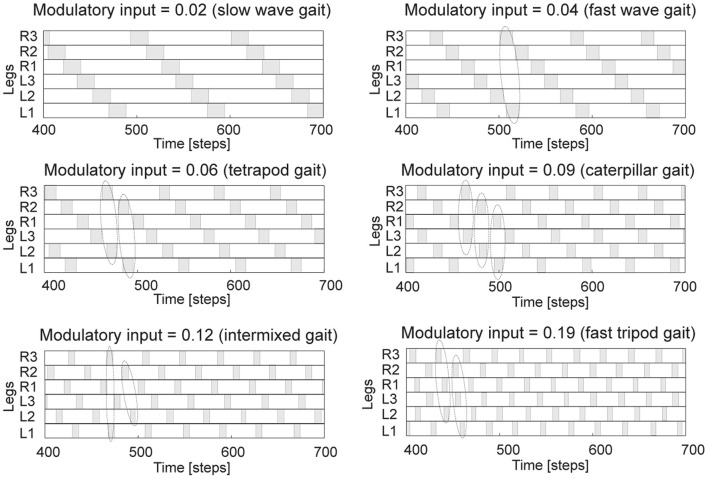
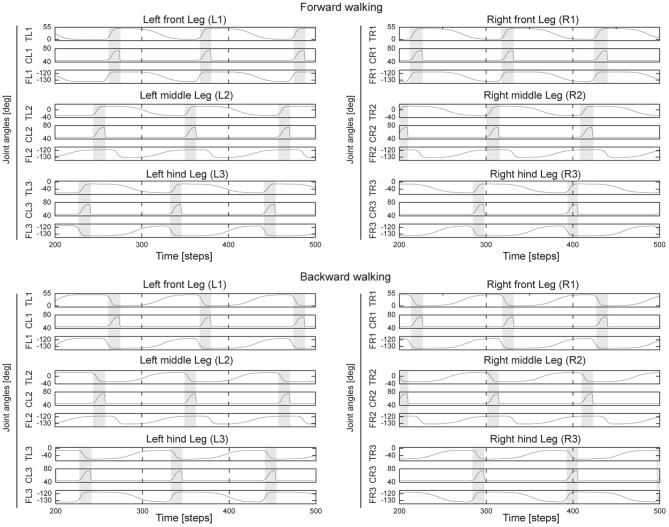
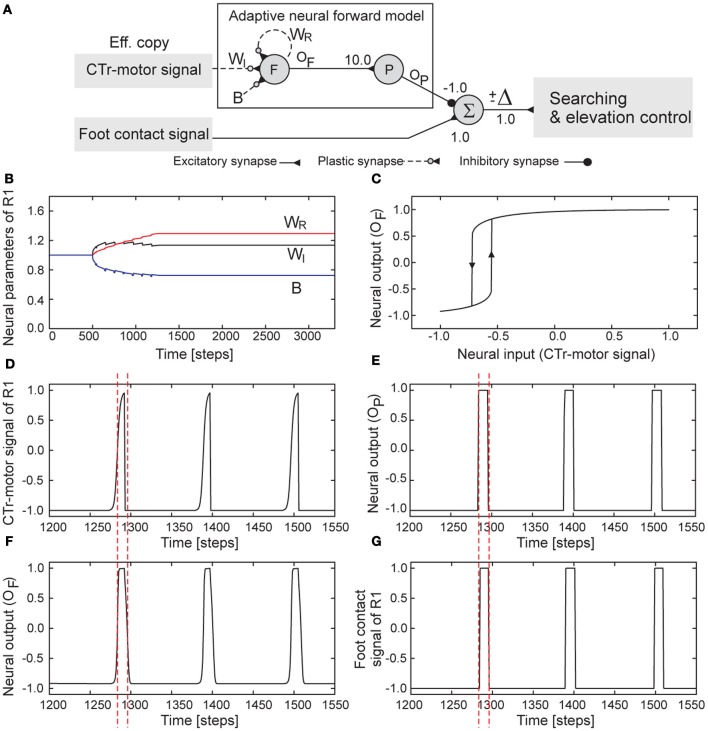
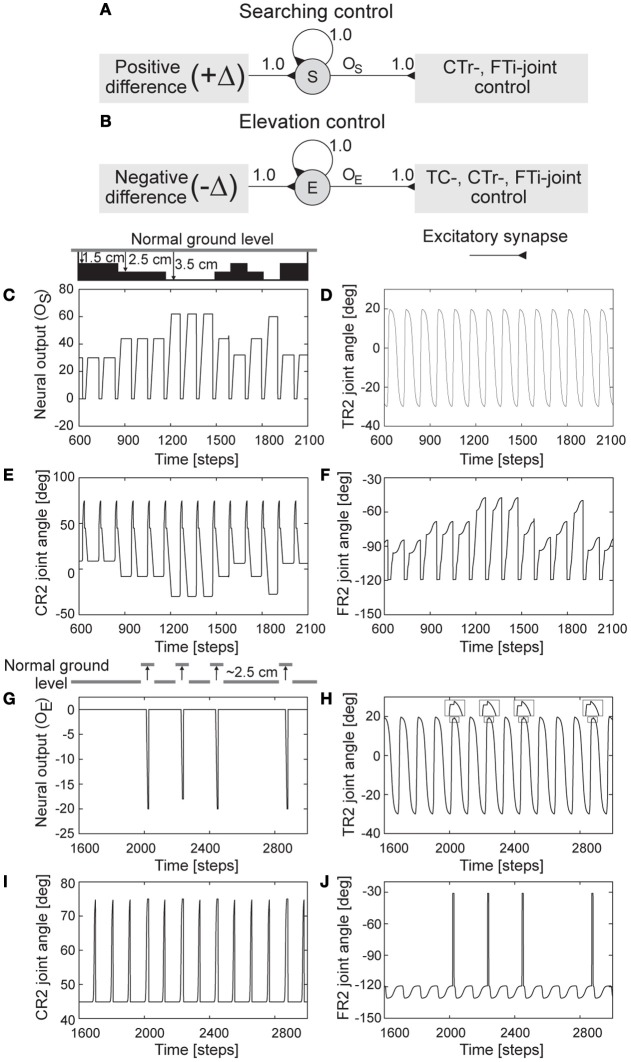
Living creatures, like walking animals, have found fascinating solutions for the problem of locomotion control. Their movements show the impression of elegance including versatile, energy-efficient, and adaptable locomotion. During the last few decades, roboticists have tried to imitate such natural properties with artificial legged locomotion systems by using different approaches including machine learning algorithms, classical engineering control techniques, and biologically-inspired control mechanisms. However, their levels of performance are still far from the natural ones. By contrast, animal locomotion mechanisms seem to largely depend not only on central mechanisms (central pattern generators, CPGs) and sensory feedback (afferent-based control) but also on internal forward models (efference copies). They are used to a different degree in different animals. Generally, CPGs organize basic rhythmic motions which are shaped by sensory feedback while internal models are used for sensory prediction and state estimations. According to this concept, we present here adaptive neural locomotion control consisting of a CPG mechanism with neuromodulation and local leg control mechanisms based on sensory feedback and adaptive neural forward models with efference copies. This neural closed-loop controller enables a walking machine to perform a multitude of different walking patterns including insect-like leg movements and gaits as well as energy-efficient locomotion. In addition, the forward models allow the machine to autonomously adapt its locomotion to deal with a change of terrain, losing of ground contact during stance phase, stepping on or hitting an obstacle during swing phase, leg damage, and even to promote cockroach-like climbing behavior. Thus, the results presented here show that the employed embodied neural closed-loop system can be a powerful way for developing robust and adaptable machines.
生物,如行走的动物,已经为运动控制问题找到了引人入胜的解决方案。它们的运动给人留下了优雅的印象,包括多功能、高效能和适应性的运动。在过去几十年中,机器人学家试图通过使用不同的方法,包括机器学习算法、经典工程控制技术和受生物启发的控制机制,来模仿这些自然特性,使用人工腿式运动系统。然而,它们的性能水平仍然远远低于自然水平。相比之下,动物的运动机制似乎不仅主要依赖于中央机制(中枢模式发生器,CPGs)和感觉反馈(基于感觉的控制),而且还依赖于内部前向模型(传出副本)。它们在不同的动物中使用程度不同。一般来说,CPGs 组织基本的节奏运动,这些运动被感觉反馈所塑造,而内部模型则用于感觉预测和状态估计。根据这个概念,我们在这里提出了自适应神经运动控制,它由一个带有神经调节的 CPG 机制和基于感觉反馈和自适应神经前向模型的局部腿部控制机制组成,这些模型带有传出副本。这个神经闭环控制器使步行机能够执行多种不同的步行模式,包括昆虫样的腿部运动和步态,以及高效能的运动。此外,前向模型允许机器自主地适应其运动,以应对地形变化、在支撑阶段失去地面接触、在摆动阶段踩到或撞到障碍物、腿部损伤,甚至促进类似蟑螂的攀爬行为。因此,这里呈现的结果表明,所采用的嵌入式神经闭环系统可以成为开发健壮和适应性强的机器的有力方法。