Selma Boumediene, Chouraqui Samira
Department of Computer Science, Faculty of Science, University of Science and Technology "Mohamed Boudiaf" USTO Oran, Oran, BP1505, Algeria.
Springerplus. 2013 Apr 27;2(1):188. doi: 10.1186/2193-1801-2-188. Print 2013 Dec.
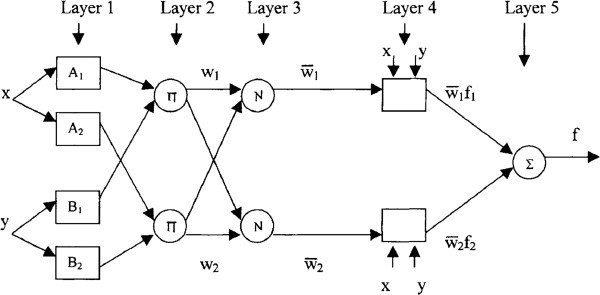
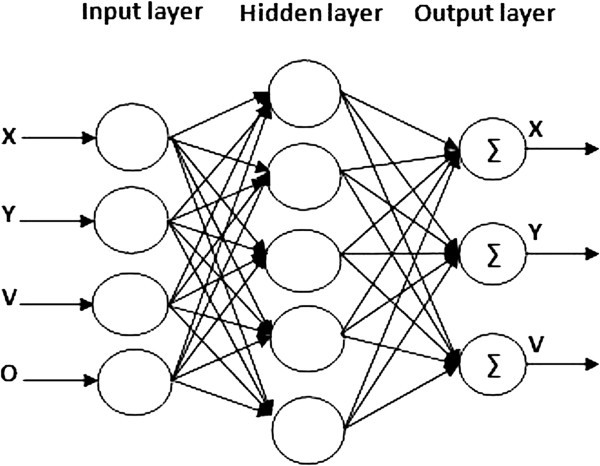
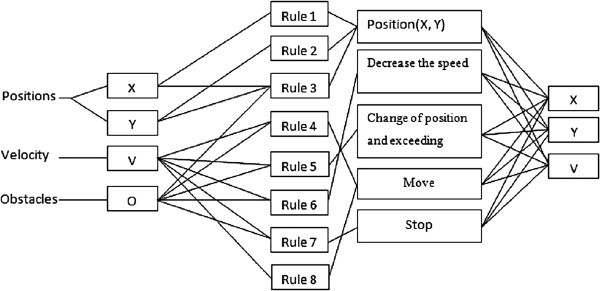
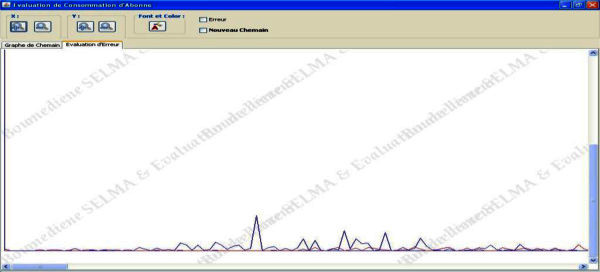
A Neuro-fuzzy control method for an Unmanned Vehicle (UV) simulation is described. The objective is guiding an autonomous vehicle to a desired destination along a desired path in an environment characterized by a terrain and a set of distinct objects, such as obstacles like donkey traffic lights and cars circulating in the trajectory. The autonomous navigate ability and road following precision are mainly influenced by its control strategy and real-time control performance. Fuzzy Logic Controller can very well describe the desired system behavior with simple "if-then" relations owing the designer to derive "if-then" rules manually by trial and error. On the other hand, Neural Networks perform function approximation of a system but cannot interpret the solution obtained neither check if its solution is plausible. The two approaches are complementary. Combining them, Neural Networks will allow learning capability while Fuzzy-Logic will bring knowledge representation (Neuro-Fuzzy). In this paper, an artificial neural network fuzzy inference system (ANFIS) controller is described and implemented to navigate the autonomous vehicle. Results show several improvements in the control system adjusted by neuro-fuzzy techniques in comparison to the previous methods like Artificial Neural Network (ANN).
描述了一种用于无人驾驶车辆(UV)模拟的神经模糊控制方法。目标是在一个以地形和一组不同物体为特征的环境中,引导自动驾驶车辆沿着期望路径到达期望目的地,这些物体包括诸如驴形交通信号灯和在轨迹中行驶的汽车等障碍物。自主导航能力和道路跟踪精度主要受其控制策略和实时控制性能的影响。模糊逻辑控制器可以通过简单的“如果-那么”关系很好地描述期望的系统行为,这使得设计者可以通过反复试验手动推导“如果-那么”规则。另一方面,神经网络执行系统的函数逼近,但既不能解释所获得的解决方案,也无法检查其解决方案是否合理。这两种方法是互补的。将它们结合起来,神经网络将提供学习能力,而模糊逻辑将带来知识表示(神经模糊)。本文描述并实现了一种人工神经网络模糊推理系统(ANFIS)控制器,用于自动驾驶车辆的导航。结果表明,与诸如人工神经网络(ANN)等先前方法相比,通过神经模糊技术调整的控制系统有了若干改进。