Marine Navigation Research Institute, College of Automation, Harbin Engineering University, Harbin 150001, China.
Sensors (Basel). 2013 Jun 25;13(7):8103-39. doi: 10.3390/s130708103.
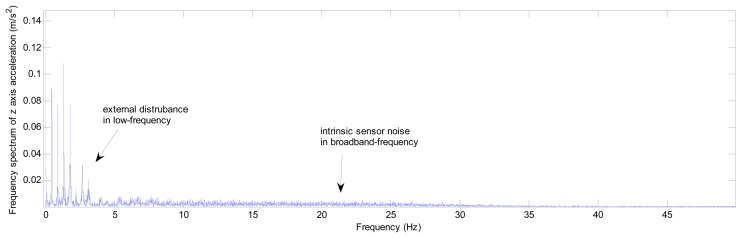
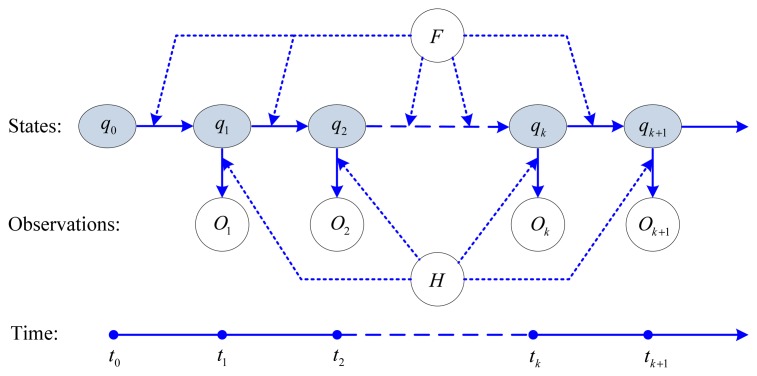
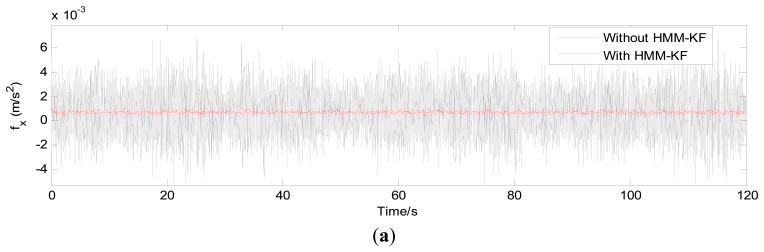
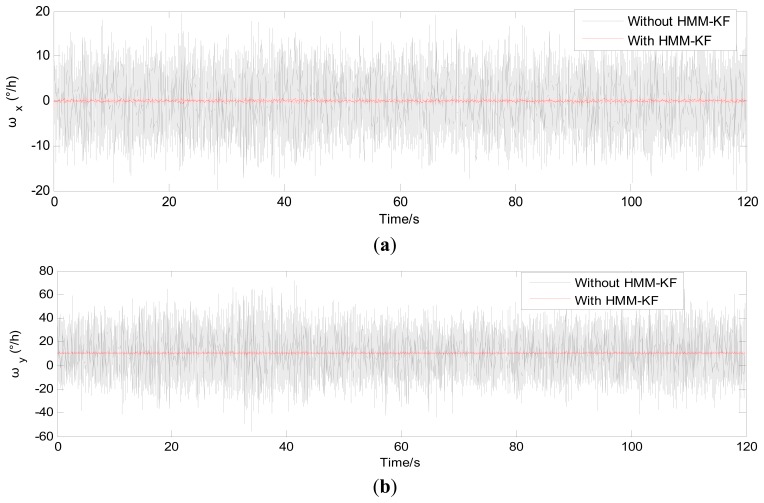
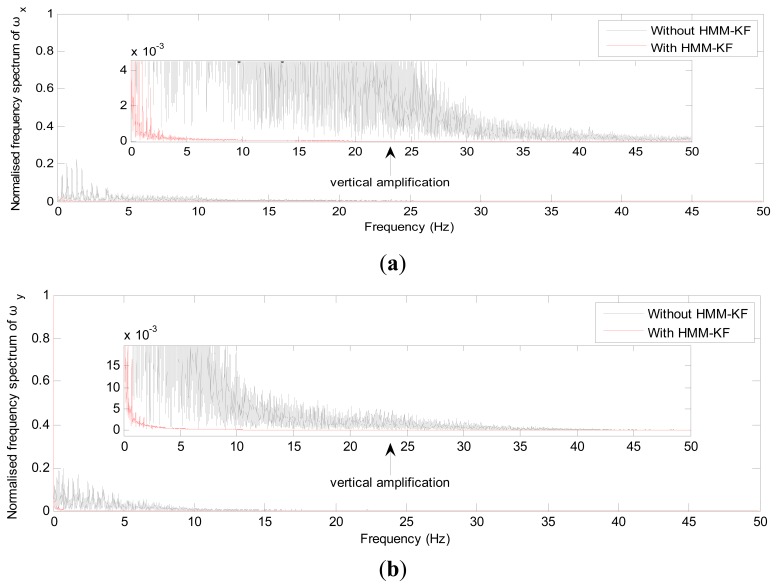
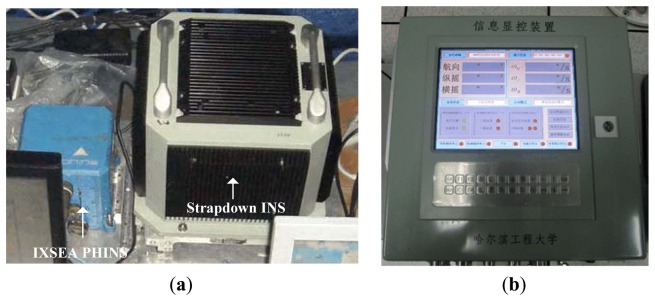
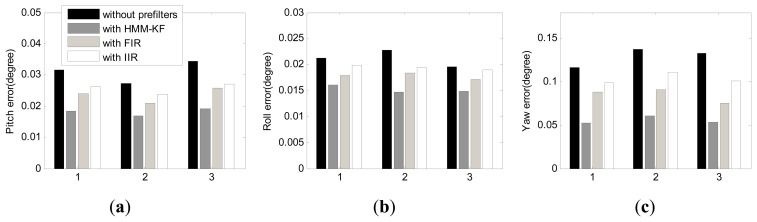
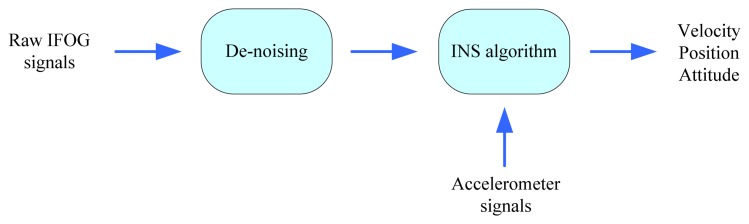
Strapdown inertial navigation systems (INS) need an alignment process to determine the initial attitude matrix between the body frame and the navigation frame. The conventional alignment process is to compute the initial attitude matrix using the gravity and Earth rotational rate measurements. However, under mooring conditions, the inertial measurement unit (IMU) employed in a ship's strapdown INS often suffers from both the intrinsic sensor noise components and the external disturbance components caused by the motions of the sea waves and wind waves, so a rapid and precise alignment of a ship's strapdown INS without any auxiliary information is hard to achieve. A robust solution is given in this paper to solve this problem. The inertial frame based alignment method is utilized to adapt the mooring condition, most of the periodical low-frequency external disturbance components could be removed by the mathematical integration and averaging characteristic of this method. A novel prefilter named hidden Markov model based Kalman filter (HMM-KF) is proposed to remove the relatively high-frequency error components. Different from the digital filters, the HMM-KF barely cause time-delay problem. The turntable, mooring and sea experiments favorably validate the rapidness and accuracy of the proposed self-alignment method and the good de-noising performance of HMM-KF.
捷联惯性导航系统(INS)需要对准过程来确定体坐标系和导航坐标系之间的初始姿态矩阵。传统的对准过程是使用重力和地球自转速率测量来计算初始姿态矩阵。然而,在系泊条件下,船舶捷联惯性导航系统中使用的惯性测量单元(IMU)通常会受到固有传感器噪声分量和由海浪和风浪运动引起的外部干扰分量的影响,因此很难在没有任何辅助信息的情况下实现船舶捷联惯性导航系统的快速和精确对准。本文给出了一个稳健的解决方案来解决这个问题。利用基于惯性坐标系的对准方法来适应系泊条件,该方法的数学积分和平均特性可以消除大部分周期性低频外部干扰分量。提出了一种新的预滤波器,称为基于隐马尔可夫模型的卡尔曼滤波器(HMM-KF),用于去除相对高频的误差分量。与数字滤波器不同,HMM-KF 几乎不会引起时滞问题。转台、系泊和海上实验充分验证了所提出的自对准方法的快速性和准确性以及 HMM-KF 的良好去噪性能。