Tergas Ana I, Sheth Sangini B, Green Isabel C, Giuntoli Robert L, Winder Abigail D, Fader Amanda N
Department of Gynecology and Obstetrics, Johns Hopkins Medical Institutions, Baltimore, MD, USA.
JSLS. 2013 Apr-Jun;17(2):219-26. doi: 10.4293/108680813X13654754535872.
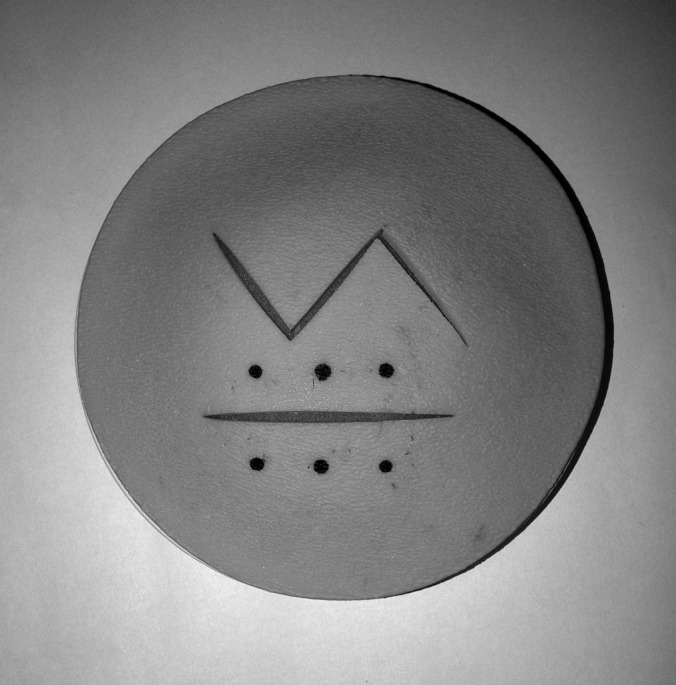
Our objectives were to compare the utility of learning a suturing task on the virtual reality da Vinci Skills Simulator versus the da Vinci Surgical System dry laboratory platform and to assess user satisfaction among novice robotic surgeons.
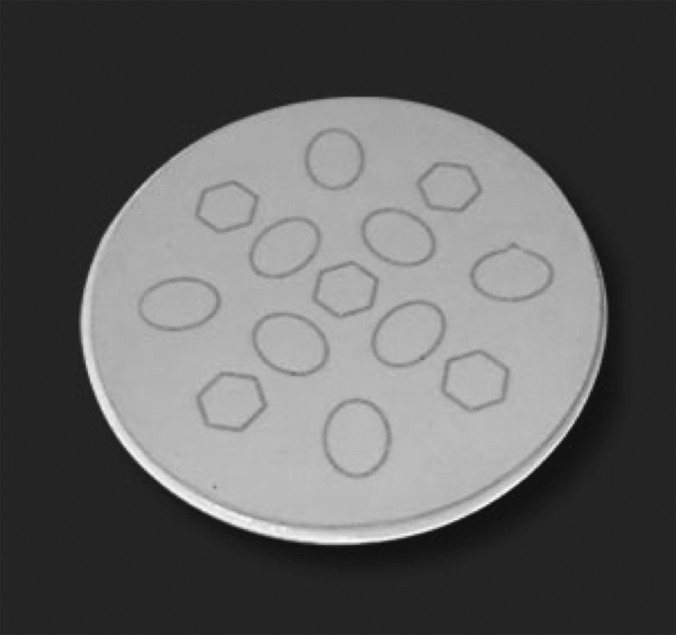
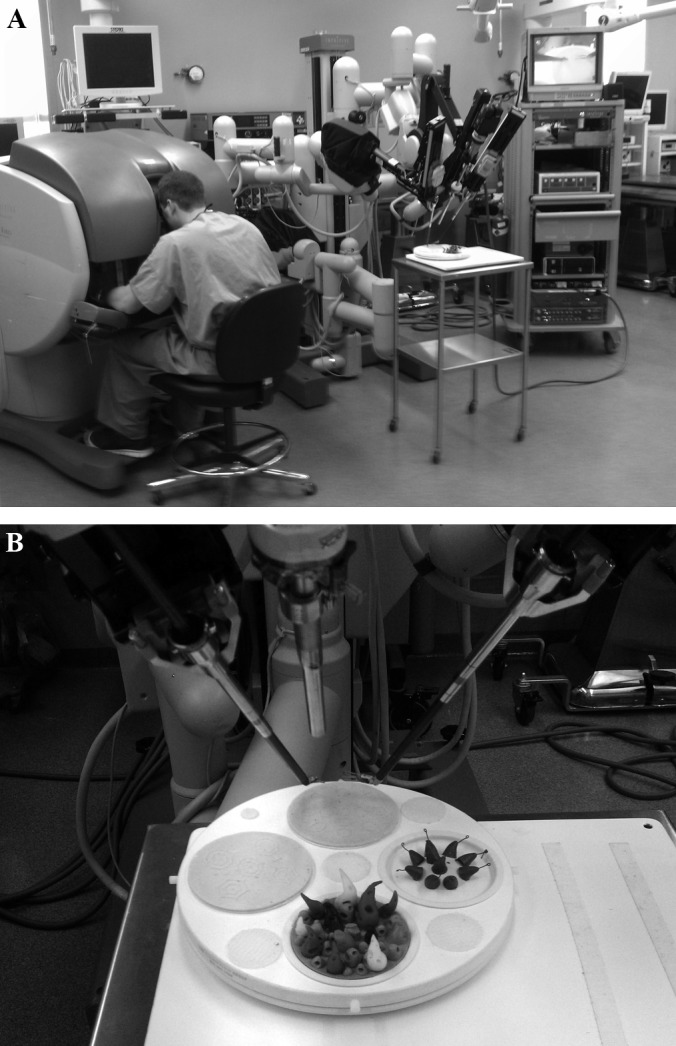
Medical trainees were enrolled prospectively; one group trained on the virtual reality simulator, and the other group trained on the da Vinci dry laboratory platform. Trainees received pretesting and post-testing on the dry laboratory platform. Participants then completed an anonymous online user experience and satisfaction survey.
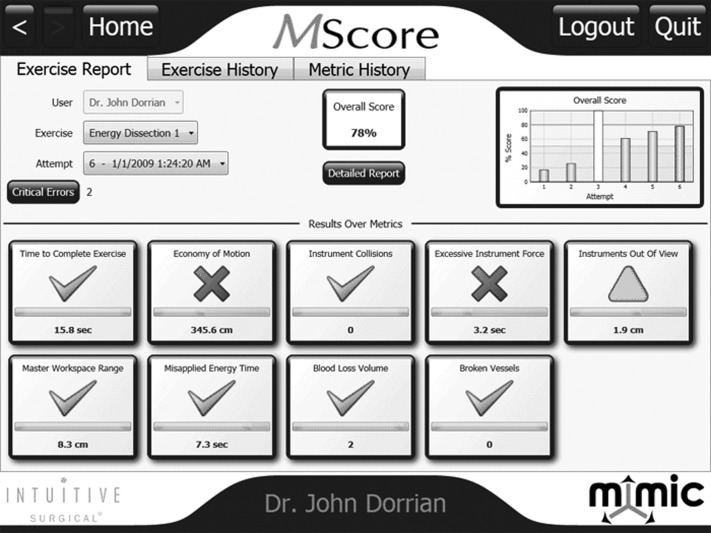
We enrolled 20 participants. Mean pretest completion times did not significantly differ between the 2 groups. Training with either platform was associated with a similar decrease in mean time to completion (simulator platform group, 64.9 seconds [P = .04]; dry laboratory platform group, 63.9 seconds [P < .01]). Most participants (58%) preferred the virtual reality platform. The majority found the training "definitely useful" in improving robotic surgical skills (mean, 4.6) and would attend future training sessions (mean, 4.5).
Training on the virtual reality robotic simulator or the dry laboratory robotic surgery platform resulted in significant improvements in time to completion and economy of motion for novice robotic surgeons. Although there was a perception that both simulators improved performance, there was a preference for the virtual reality simulator. Benefits unique to the simulator platform include autonomy of use, computerized performance feedback, and ease of setup. These features may facilitate more efficient and sophisticated simulation training above that of the conventional dry laboratory platform, without loss of efficacy.
我们的目的是比较在虚拟现实达芬奇技能模拟器与达芬奇手术系统干式实验室平台上学习缝合任务的效用,并评估新手机器人外科医生的用户满意度。
前瞻性招募医学实习生;一组在虚拟现实模拟器上训练,另一组在达芬奇干式实验室平台上训练。实习生在干式实验室平台上接受预测试和后测试。参与者随后完成一份匿名的在线用户体验和满意度调查。
我们招募了20名参与者。两组的平均预测试完成时间无显著差异。使用任一平台进行训练均与平均完成时间的类似减少相关(模拟器平台组,64.9秒[P = .04];干式实验室平台组,63.9秒[P < .01])。大多数参与者(58%)更喜欢虚拟现实平台。大多数人认为该训练“肯定有用”,有助于提高机器人手术技能(平均分为4.6),并愿意参加未来的培训课程(平均分为4.5)。
在虚拟现实机器人模拟器或干式实验室机器人手术平台上进行训练,可使新手机器人外科医生在完成时间和动作经济性方面有显著改善。尽管有人认为两种模拟器都能提高性能,但对虚拟现实模拟器更有偏好。模拟器平台独有的优势包括使用自主性、计算机化性能反馈和易于设置。这些特性可能有助于开展比传统干式实验室平台更高效、更复杂的模拟训练,且不降低效果。