Department of Mechanical, Informatics and Aeroespatial Engineering, University of León, León 24071, Spain.
Sensors (Basel). 2013 Aug 13;13(8):10430-48. doi: 10.3390/s130810430.
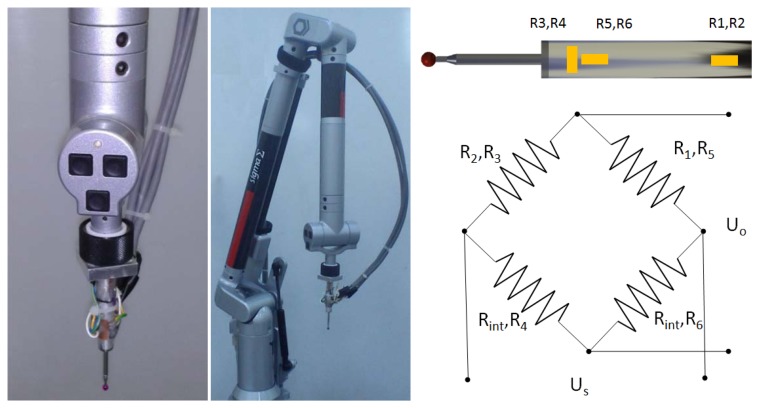
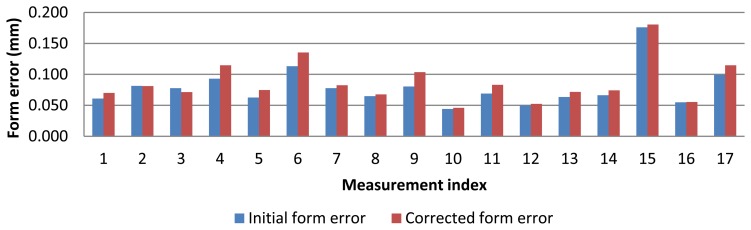
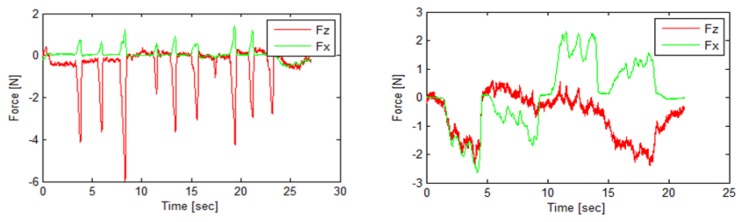
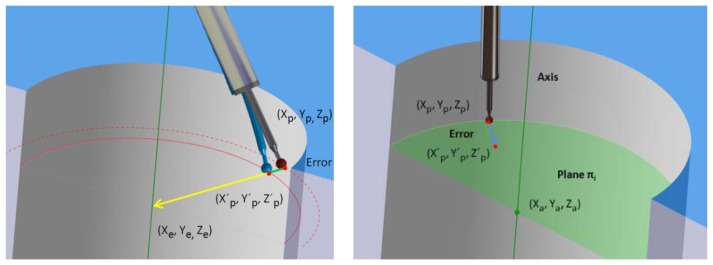
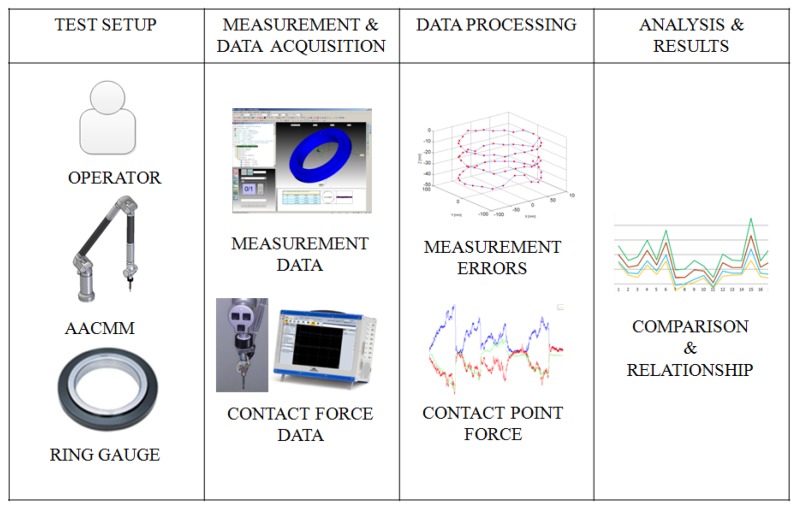
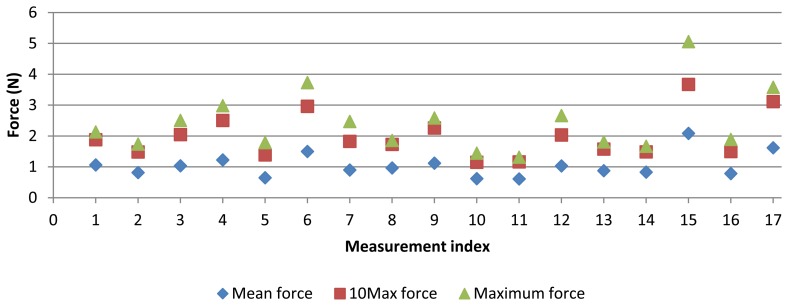
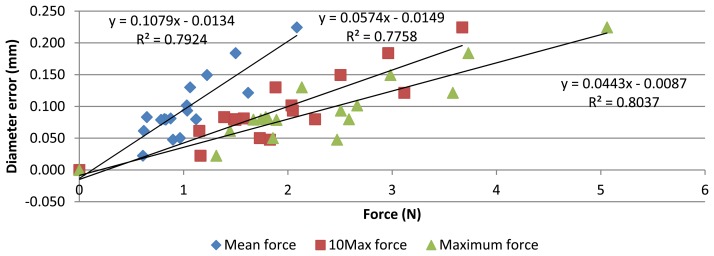
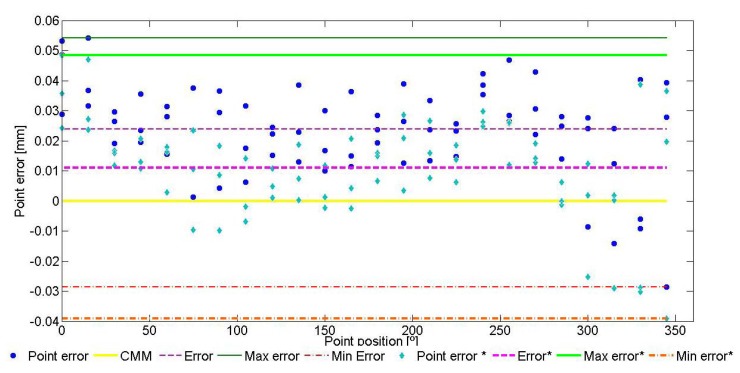
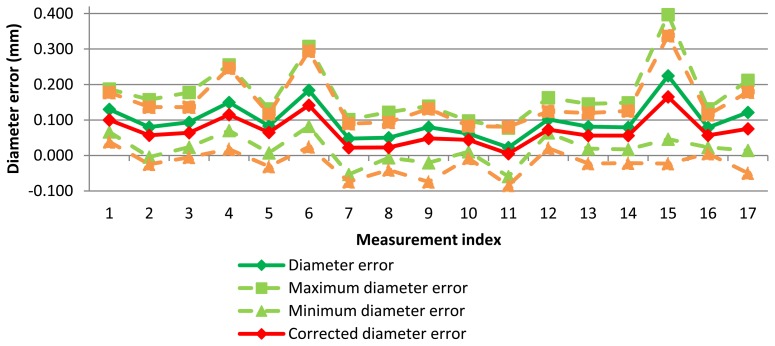
A study of the operator contact force influence on the performance of Articulated Arm Coordinate Measuring Machines (AACMMs) is presented in this paper. After developing a sensor capable of measuring the contact force applied by an operator, a ring gauge has been used to analyse the relationship between the contact force and diameter and form errors measured with the AACMM. As a result, contact force has been proved as one of the main factors influencing the AACMM performance. A probe deflection model based on the Finite Element Method (FEM) has been also proposed in order to obtain the AACMM probe deflection caused by contact force. This allows measurement correction by comparing them with reference values, specifically, a ring gauge. Experimental test results show a significant measurement improvement that minimizes diameter error. Finally, an uncertainty evaluation for the contact force sensor and AACMM measurements with and without probe deflection model has been carried out in order to validate the ability of the sensor and the methodology followed.
本文研究了操作人员接触力对关节臂坐标测量机(AACMM)性能的影响。在开发出一种能够测量操作人员施加的接触力的传感器之后,使用环规分析了接触力与 AACMM 测量的直径和形状误差之间的关系。结果表明,接触力是影响 AACMM 性能的主要因素之一。还提出了一种基于有限元法(FEM)的探头挠度模型,以获得由接触力引起的 AACMM 探头挠度。这允许通过将它们与参考值(特别是环规)进行比较来进行测量校正。实验测试结果表明,测量精度有了显著提高,直径误差最小化。最后,对带有和不带有探头挠度模型的接触力传感器和 AACMM 测量进行了不确定度评估,以验证传感器的能力和所采用的方法。