Department of Neurophysiology, I.R.C.C.S. S.Camillo Hospital Foundation , Venice , Italy ; Laboratory of Kinematics and Robotics, I.R.C.C.S. S.Camillo Hospital Foundation , Venice , Italy.
Front Neurol. 2013 Nov 7;4:173. doi: 10.3389/fneur.2013.00173. eCollection 2013.
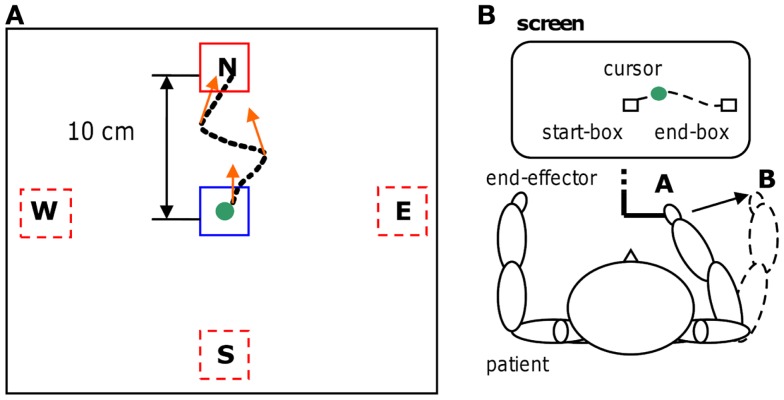
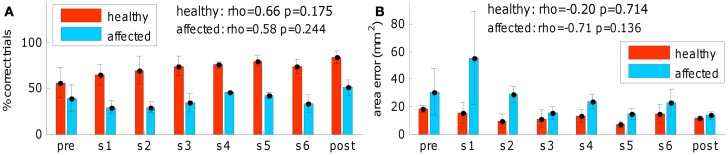
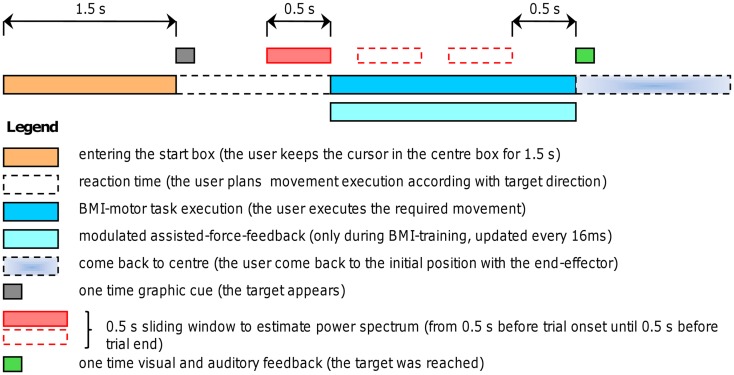
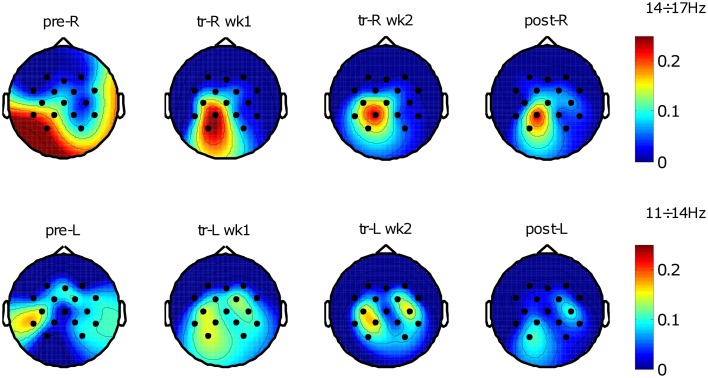
In a proof-of-principle prototypical demonstration we describe a new type of brain-machine interface (BMI) paradigm for upper limb motor-training. The proposed technique allows a fast contingent and proportionally modulated stimulation of afferent proprioceptive and motor output neural pathways using operant learning. Continuous and immediate assisted-feedback of force proportional to rolandic rhythm oscillations during actual movements was employed and illustrated with a single case experiment. One hemiplegic patient was trained for 2 weeks coupling somatosensory brain oscillations with force-field control during a robot-mediated center-out motor-task whose execution approaches movements of everyday life. The robot facilitated actual movements adding a modulated force directed to the target, thus providing a non-delayed proprioceptive feedback. Neuro-electric, kinematic, and motor-behavioral measures were recorded in pre- and post-assessments without force assistance. Patient's healthy arm was used as control since neither a placebo control was possible nor other control conditions. We observed a generalized and significant kinematic improvement in the affected arm and a spatial accuracy improvement in both arms, together with an increase and focalization of the somatosensory rhythm changes used to provide assisted-force-feedback. The interpretation of the neurophysiological and kinematic evidences reported here is strictly related to the repetition of the motor-task and the presence of the assisted-force-feedback. Results are described as systematic observations only, without firm conclusions about the effectiveness of the methodology. In this prototypical view, the design of appropriate control conditions is discussed. This study presents a novel operant-learning-based BMI-application for motor-training coupling brain oscillations and force feedback during an actual movement.
在一项原理验证原型演示中,我们描述了一种用于上肢运动训练的新型脑机接口 (BMI) 范式。所提出的技术允许使用操作性学习快速连续地对传入的本体感受和运动输出神经通路进行随附的、成比例的调制刺激。在实际运动期间,采用连续的、即时的力反馈,该力与罗兰氏节律振荡成正比,并通过单个病例实验进行了说明。一名偏瘫患者接受了 2 周的训练,在机器人介导的中心外运动任务中,将体感脑振荡与力场控制相结合,该任务的执行接近日常生活中的运动。机器人通过添加指向目标的调制力来辅助实际运动,从而提供非延迟的本体感受反馈。在没有力辅助的情况下,在预评估和后评估中记录神经电、运动学和运动行为测量值。由于不可能进行安慰剂对照或其他对照条件,因此使用患者健康的手臂作为对照。我们观察到受影响手臂的运动学得到了普遍且显著的改善,并且两个手臂的空间准确性都得到了改善,同时用于提供辅助力反馈的体感节律变化也增加了并且集中了。这里报告的神经生理和运动学证据的解释严格与运动任务的重复和辅助力反馈的存在有关。结果仅被描述为系统观察,而没有关于该方法有效性的明确结论。在这种原型观点中,讨论了适当的对照条件的设计。这项研究提出了一种新的基于操作性学习的 BMI 应用,用于在实际运动期间耦合脑振荡和力反馈进行运动训练。