Musculoskeletal Biomechanics Research Laboratory, Department of Civil and Mechanical Engineering, University of Missouri - Kansas City, 5100 Rockhill Road, Kansas City, MO 64110-2499, United States.
Departments of Physical Therapy and Orthopaedic Surgery, University of Missouri, 801 Clark Hall, Columbia, MO 65211-4250, United States.
Med Eng Phys. 2014 Mar;36(3):335-44. doi: 10.1016/j.medengphy.2013.12.007. Epub 2014 Jan 11.
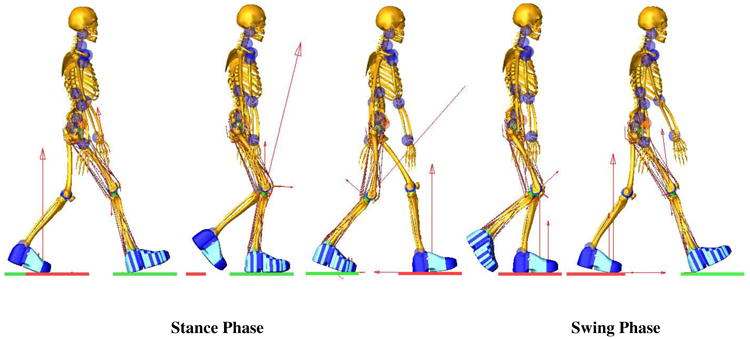
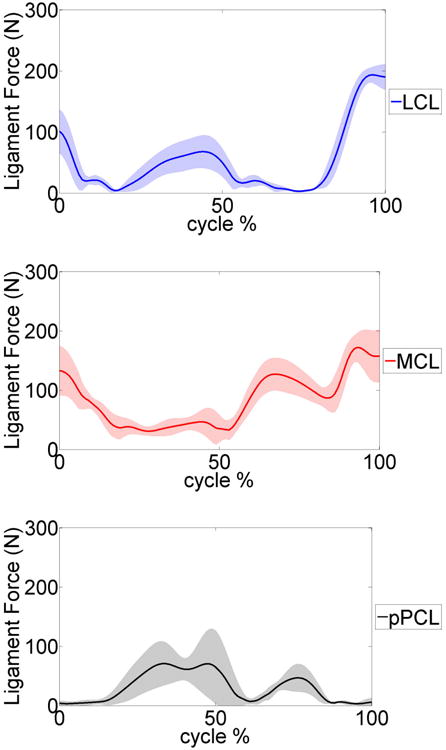
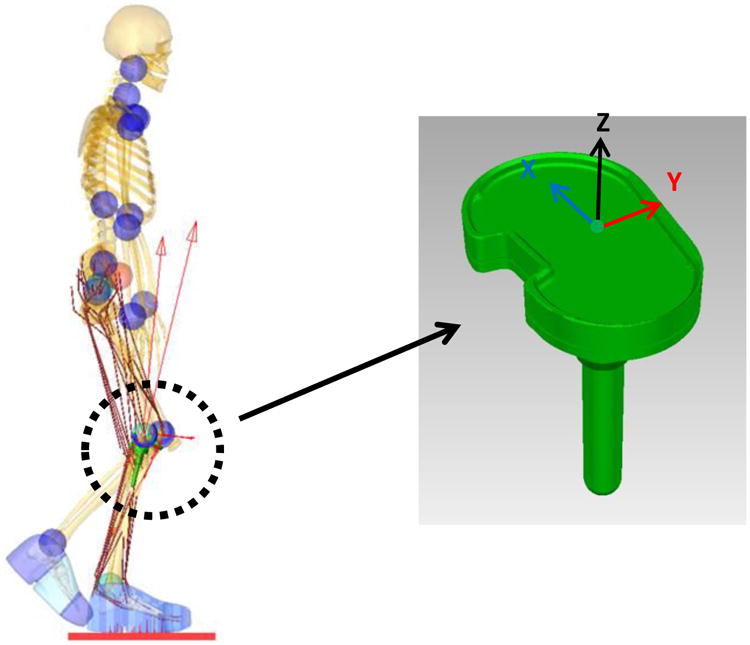
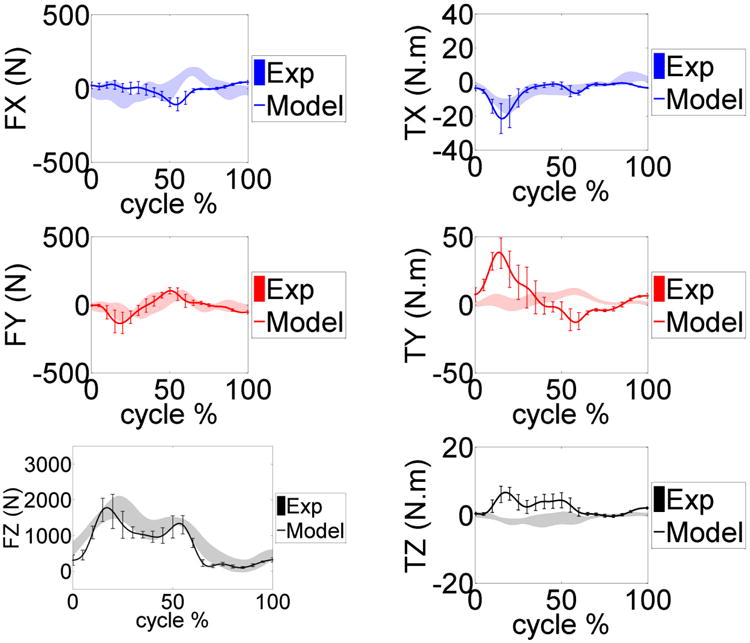
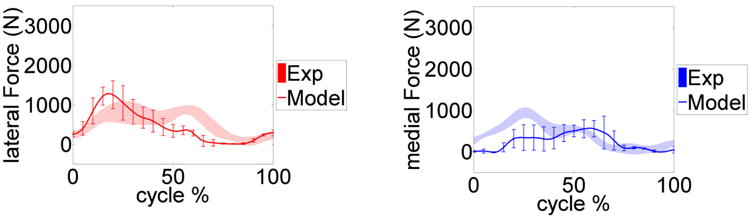
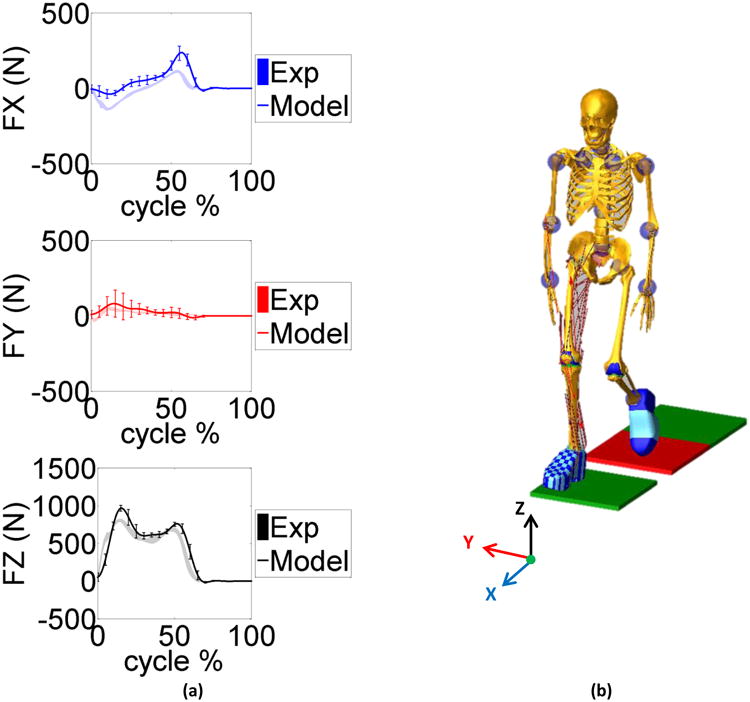
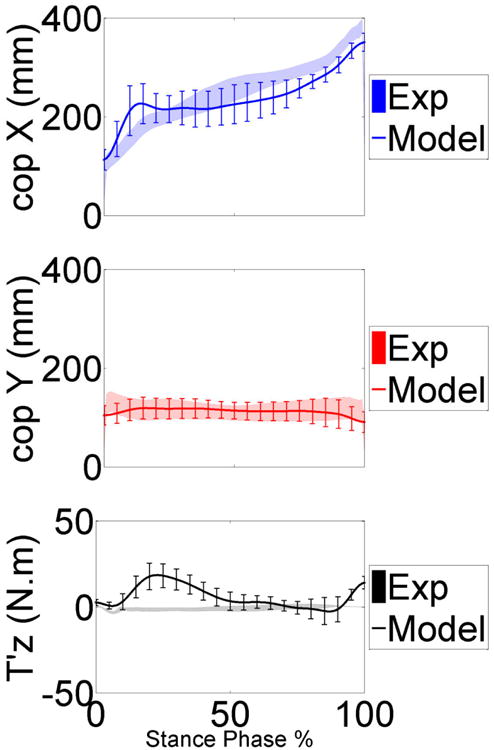
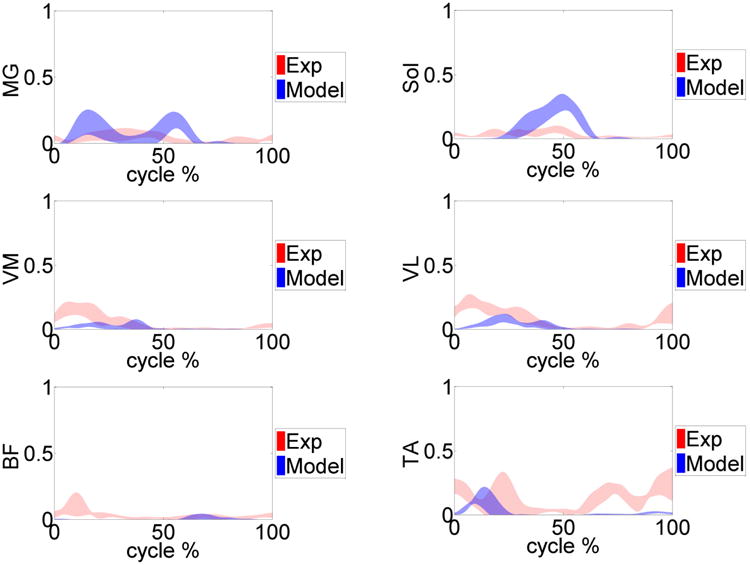
Knowledge of the forces acting on musculoskeletal joint tissues during movement benefits tissue engineering, artificial joint replacement, and our understanding of ligament and cartilage injury. Computational models can be used to predict these internal forces, but musculoskeletal models that simultaneously calculate muscle force and the resulting loading on joint structures are rare. This study used publicly available gait, skeletal geometry, and instrumented prosthetic knee loading data [1] to evaluate muscle driven forward dynamics simulations of walking. Inputs to the simulation were measured kinematics and outputs included muscle, ground reaction, ligament, and joint contact forces. A full body musculoskeletal model with subject specific lower extremity geometries was developed in the multibody framework. A compliant contact was defined between the prosthetic femoral component and tibia insert geometries. Ligament structures were modeled with a nonlinear force-strain relationship. The model included 45 muscles on the right lower leg. During forward dynamics simulations a feedback control scheme calculated muscle forces using the error signal between the current muscle lengths and the lengths recorded during inverse kinematics simulations. Predicted tibio-femoral contact force, ground reaction forces, and muscle forces were compared to experimental measurements for six different gait trials using three different gait types (normal, trunk sway, and medial thrust). The mean average deviation (MAD) and root mean square deviation (RMSD) over one gait cycle are reported. The muscle driven forward dynamics simulations were computationally efficient and consistently reproduced the inverse kinematics motion. The forward simulations also predicted total knee contact forces (166N<MAD<404N, 212N<RMSD<448N) and vertical ground reaction forces (66N<MAD<90N, 97N<RMSD<128N) well within 28% and 16% of experimental loads, respectively. However the simplified muscle length feedback control scheme did not realistically represent physiological motor control patterns during gait. Consequently, the simulations did not accurately predict medial/lateral tibio-femoral force distribution and muscle activation timing.
了解运动过程中作用于肌肉骨骼关节组织的力有益于组织工程、人工关节置换以及我们对韧带和软骨损伤的理解。计算模型可用于预测这些内力,但同时计算肌肉力和关节结构的相应载荷的肌肉骨骼模型却很少见。本研究使用了公开的步态、骨骼几何形状和仪器化假肢膝关节加载数据[1]来评估行走时肌肉驱动的正向动力学模拟。模拟的输入为测量的运动学,输出包括肌肉、地面反作用力、韧带和关节接触力。在多体框架中开发了具有受试者特定下肢几何形状的全身肌肉骨骼模型。定义了假肢股骨部件和胫骨插入件几何形状之间的弹性接触。使用非线性力-应变关系来模拟韧带结构。该模型包括右腿小腿的 45 块肌肉。在正向动力学模拟中,使用当前肌肉长度与逆运动学模拟中记录的长度之间的误差信号,通过反馈控制方案计算肌肉力。使用三种不同的步态类型(正常、躯干摆动和内侧推力)对六个不同的步态试验进行了比较,比较了预测的胫股接触力、地面反作用力和肌肉力与实验测量值的吻合情况。报告了一个步态周期的平均绝对偏差(MAD)和均方根偏差(RMSD)。肌肉驱动的正向动力学模拟计算效率高,始终如一地再现了逆运动学运动。正向模拟还很好地预测了总膝关节接触力(166N<MAD<404N,212N<RMSD<448N)和垂直地面反作用力(66N<MAD<90N,97N<RMSD<128N),分别在实验载荷的 28%和 16%以内。然而,简化的肌肉长度反馈控制方案并没有真实地代表步态中的生理运动控制模式。因此,模拟无法准确预测内侧/外侧胫股力分布和肌肉激活时间。