Dalle Molle Institute for Artificial Intelligence Lugano, Switzerland ; Facoltà di Scienze Informatiche, Università della Svizzera Italiana Lugano, Switzerland ; Dipartimento Tecnologie Innovative, Scuola Universitaria Professionale della Svizzera Italiana Manno, Switzerland.
Front Neurorobot. 2014 Jan 6;7:25. doi: 10.3389/fnbot.2013.00025.
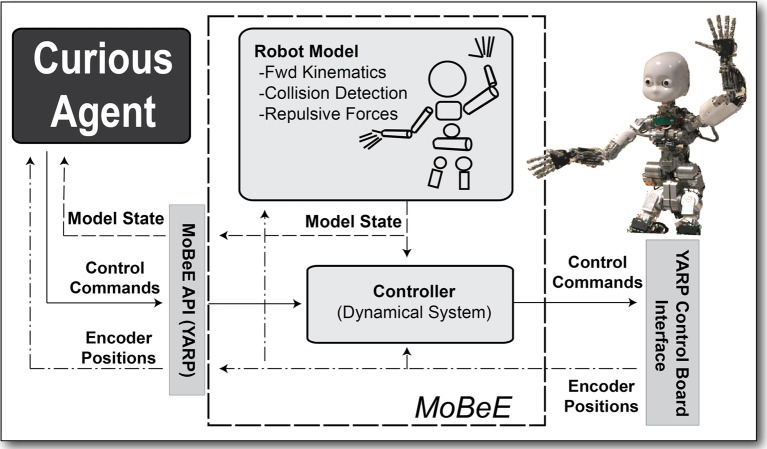
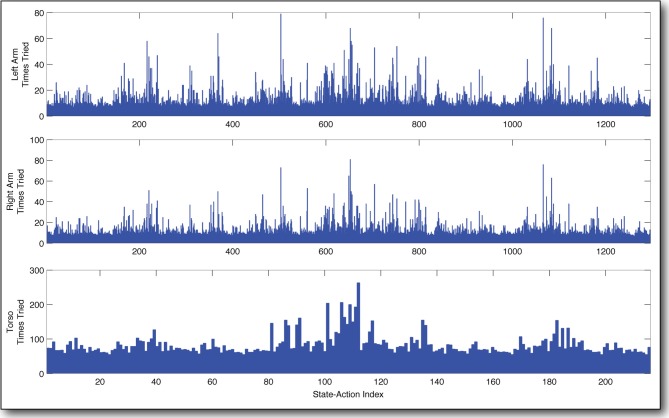
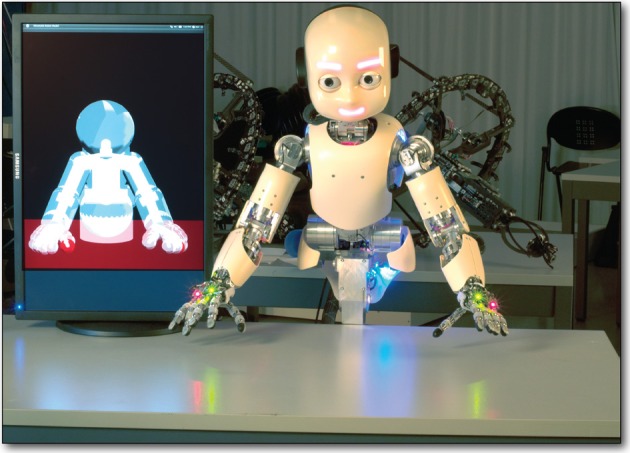
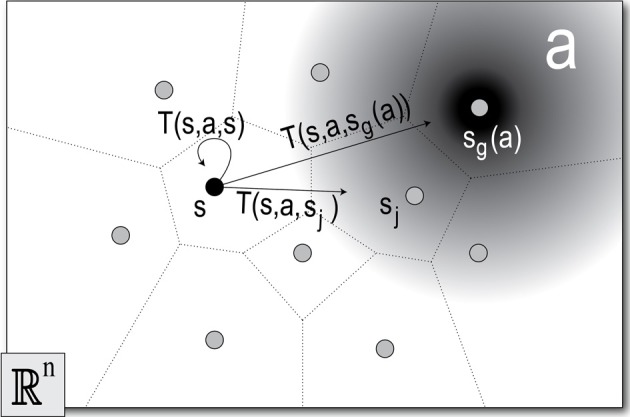
Most previous work on artificial curiosity (AC) and intrinsic motivation focuses on basic concepts and theory. Experimental results are generally limited to toy scenarios, such as navigation in a simulated maze, or control of a simple mechanical system with one or two degrees of freedom. To study AC in a more realistic setting, we embody a curious agent in the complex iCub humanoid robot. Our novel reinforcement learning (RL) framework consists of a state-of-the-art, low-level, reactive control layer, which controls the iCub while respecting constraints, and a high-level curious agent, which explores the iCub's state-action space through information gain maximization, learning a world model from experience, controlling the actual iCub hardware in real-time. To the best of our knowledge, this is the first ever embodied, curious agent for real-time motion planning on a humanoid. We demonstrate that it can learn compact Markov models to represent large regions of the iCub's configuration space, and that the iCub explores intelligently, showing interest in its physical constraints as well as in objects it finds in its environment.
大多数关于人工好奇心 (AC) 和内在动机的前期工作都集中在基本概念和理论上。实验结果通常仅限于玩具场景,例如在模拟迷宫中的导航,或者控制一个具有一到两个自由度的简单机械系统。为了在更真实的环境中研究 AC,我们在复杂的 iCub 人形机器人中体现了一个好奇的代理。我们的新型强化学习 (RL) 框架由一个最先进的、低级的、反应式控制层组成,该控制层在尊重约束的情况下控制 iCub,还有一个高级好奇代理,该代理通过最大化信息增益来探索 iCub 的状态-动作空间,从经验中学习世界模型,实时控制实际的 iCub 硬件。据我们所知,这是第一个在人形机器人上进行实时运动规划的具体化、好奇的代理。我们证明它可以学习紧凑的马尔可夫模型来表示 iCub 配置空间的大部分区域,并且 iCub 能够智能地探索,对其物理约束以及在环境中发现的物体表现出兴趣。