Perez-Ramirez Carlos A, Almanza-Ojeda Dora L, Guerrero-Tavares Jesus N, Mendoza-Galindo Francisco J, Estudillo-Ayala Julian M, Ibarra-Manzano Mario A
Laboratorio de Procesamiento Digital de Señales, Departamento de Electrónica, DICIS, Universidad de Guanajuato, Carr. Salamanca-Valle de Santiago Km. 3.5 + 1.8 Km., Salamanca 36885, Mexico.
Departamento de Ingeniería Robótica, Universidad Politécnica de Guanajuato, Av. Universidad Norte SN, Comunidad Juan Alonso, Cortazar 38483, Mexico.
Sensors (Basel). 2014 Dec 19;14(12):24483-501. doi: 10.3390/s141224483.
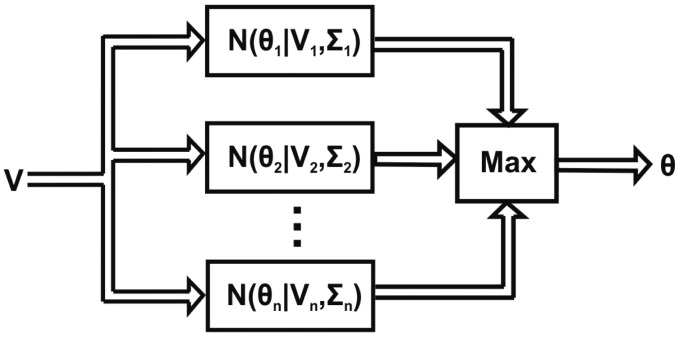
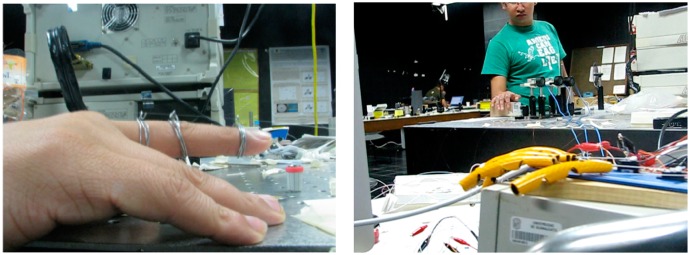
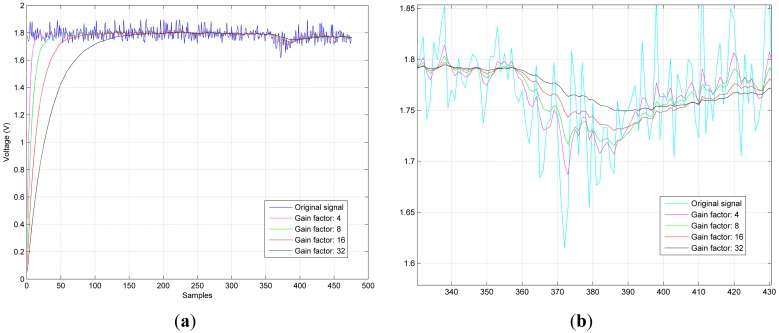
The implementation of signal filters in a real-time form requires a tradeoff between computation resources and the system performance. Therefore, taking advantage of low lag response and the reduced consumption of resources, in this article, the Recursive Least Square (RLS) algorithm is used to filter a signal acquired from a fiber-optics-based sensor. In particular, a Long-Period Fiber Grating (LPFG) sensor is used to measure the bending movement of a finger. After that, the Gaussian Mixture Model (GMM) technique allows us to classify the corresponding finger position along the motion range. For these measures to help in the development of an autonomous robotic hand, the proposed technique can be straightforwardly implemented on real time platforms such as Field Programmable Gate Array (FPGA) or Digital Signal Processors (DSP). Different angle measurements of the finger's motion are carried out by the prototype and a detailed analysis of the system performance is presented.
以实时形式实现信号滤波器需要在计算资源和系统性能之间进行权衡。因此,为利用低延迟响应并减少资源消耗,本文采用递归最小二乘(RLS)算法对从基于光纤的传感器获取的信号进行滤波。具体而言,使用长周期光纤光栅(LPFG)传感器来测量手指的弯曲运动。之后,高斯混合模型(GMM)技术使我们能够沿着运动范围对相应的手指位置进行分类。为了这些测量有助于自主机器人手的开发,所提出的技术可以直接在诸如现场可编程门阵列(FPGA)或数字信号处理器(DSP)等实时平台上实现。通过该原型对手指运动的不同角度测量进行了实验,并给出了系统性能的详细分析。