Cong Li, Li Ercui, Qin Honglei, Ling Keck Voon, Xue Rui
School of Electronic and Information Engineering, Beihang University, 37 Xueyuan Road, Haidian District, Beijing 100191, China.
School of Electrical and Electronic Engineering, Nanyang Technological University, 50 Nangyang Avenue 639798, Singapore.
Sensors (Basel). 2015 Mar 9;15(3):5722-46. doi: 10.3390/s150305722.
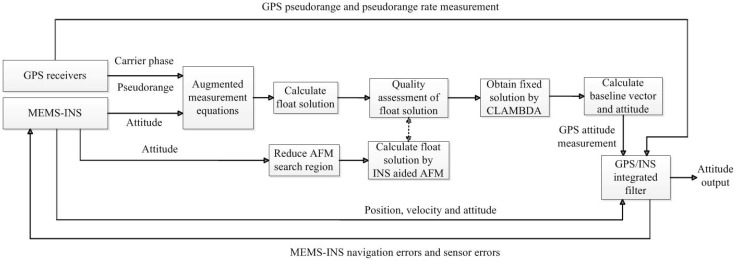
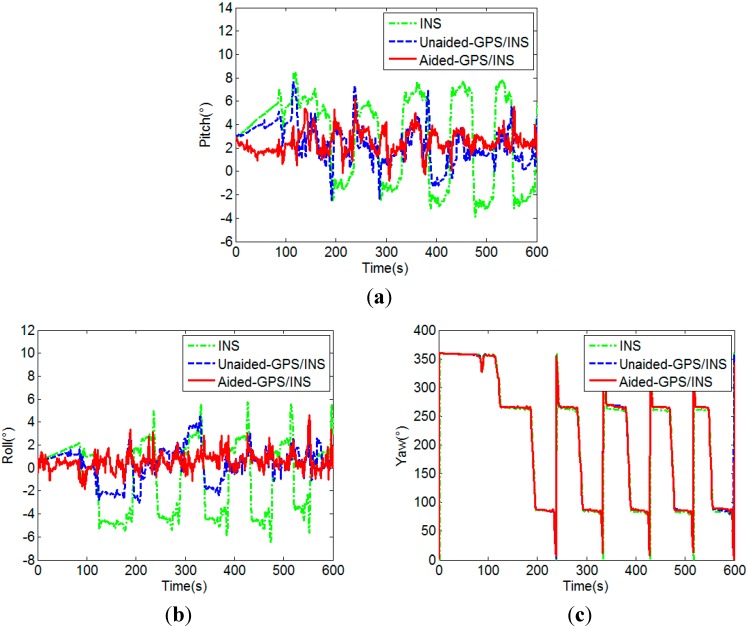
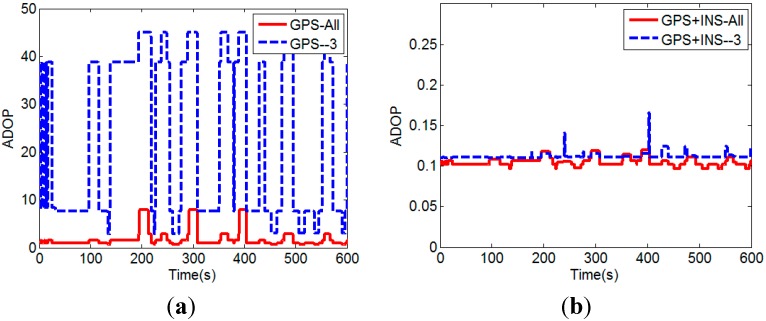
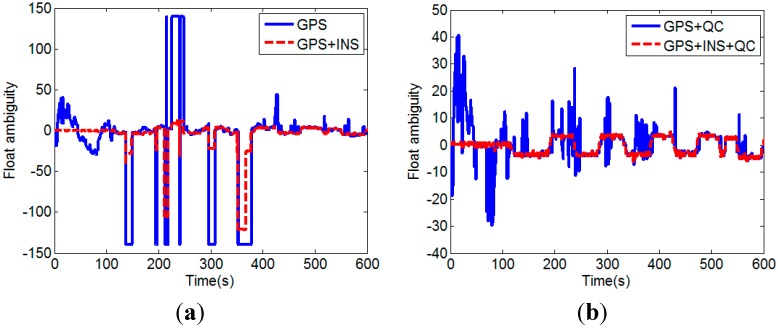
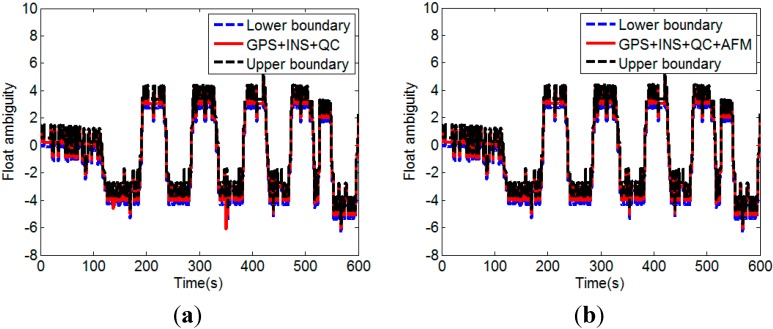
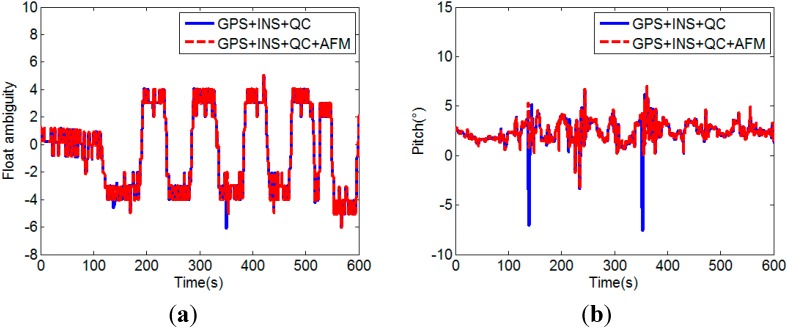
Global positioning system (GPS) technology is well suited for attitude determination. However, in land vehicle application, low-cost single frequency GPS receivers which have low measurement quality are often used, and external factors such as multipath and low satellite visibility in the densely built-up urban environment further degrade the quality of the GPS measurements. Due to the low-quality receivers used and the challenging urban environment, the success rate of the single epoch ambiguity resolution for dynamic attitude determination is usually quite low. In this paper, a micro-electro-mechanical system (MEMS)-inertial navigation system (INS)-aided ambiguity resolution method is proposed to improve the GPS attitude determination performance, which is particularly suitable for land vehicle attitude determination. First, the INS calculated baseline vector is augmented with the GPS carrier phase and code measurements. This improves the ambiguity dilution of precision (ADOP), resulting in better quality of the unconstrained float solution. Second, the undesirable float solutions caused by large measurement errors are further filtered and replaced using the INS-aided ambiguity function method (AFM). The fixed solutions are then obtained by the constrained least squares ambiguity decorrelation (CLAMBDA) algorithm. Finally, the GPS/MEMS-INS integration is realized by the use of a Kalman filter. Theoretical analysis of the ADOP is given and experimental results demonstrate that our proposed method can significantly improve the quality of the float ambiguity solution, leading to high success rate and better accuracy of attitude determination.
全球定位系统(GPS)技术非常适合用于姿态确定。然而,在陆地车辆应用中,常使用测量质量较低的低成本单频GPS接收机,并且在密集建设的城市环境中,诸如多径和低卫星可见性等外部因素会进一步降低GPS测量的质量。由于使用了低质量的接收机以及具有挑战性的城市环境,用于动态姿态确定的单历元模糊度解算成功率通常相当低。本文提出了一种微机电系统(MEMS)惯性导航系统(INS)辅助的模糊度解算方法,以提高GPS姿态确定性能,该方法特别适用于陆地车辆姿态确定。首先,用GPS载波相位和码测量对INS计算的基线向量进行增强。这改善了精度模糊度衰减因子(ADOP),从而得到质量更好的无约束浮点解。其次,使用INS辅助的模糊度函数法(AFM)进一步过滤并替换由大测量误差引起的不良浮点解。然后通过约束最小二乘模糊度去相关(CLAMBDA)算法获得固定解。最后,利用卡尔曼滤波器实现GPS/MEMS-INS集成。给出了ADOP的理论分析,实验结果表明,本文提出的方法可以显著提高浮点模糊度解的质量,从而实现高成功率和更好的姿态确定精度。