Jia Zixi, Wu Chengdong, Li Zhao, Zhang Yunzhou, Guan Bo
College of Information Science and Engineering, Northeastern University, NO. 3-11 Wenhua Road Heping District, Shenyang 110819, China.
Anshan Industrial Technology Research Institute, Harbin Institute of Technology, 192 Central Qianshan Road, Anshan High-Tech Zone, Anshan 114000, China.
Sensors (Basel). 2015 Nov 24;15(11):29661-84. doi: 10.3390/s151129661.
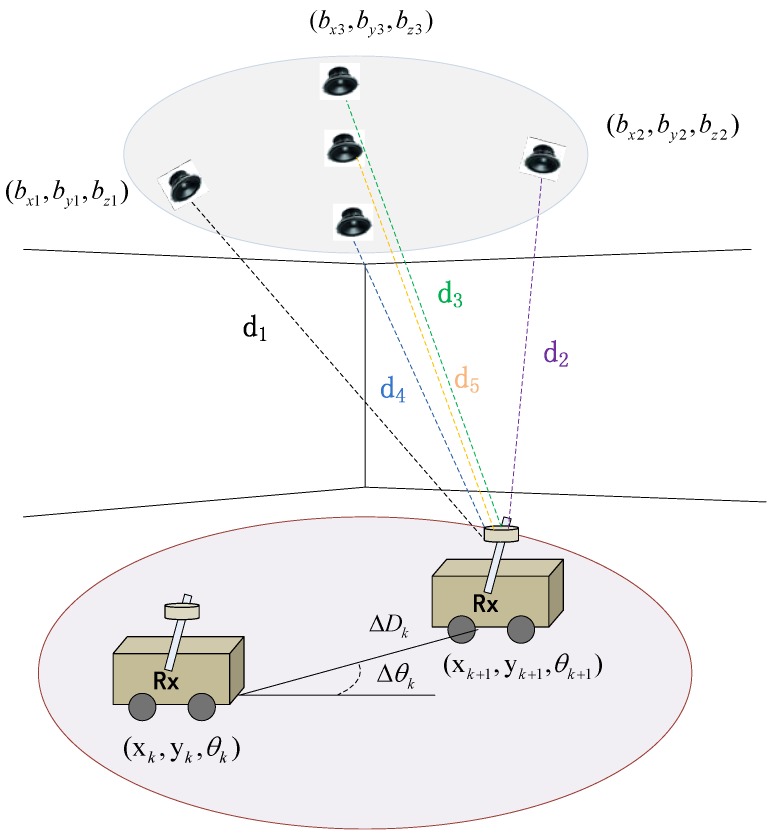
Indoor localization is a significant research area in wireless sensor networks (WSNs). Generally, the nodes of WSNs are deployed in the same plane, i.e., the floor, as the target to be positioned, which causes the sensing signal to be influenced or even blocked by unpredictable obstacles, like furniture. However, a 3D system, like Cricket, can reduce the negative impact of obstacles to the maximum extent and guarantee the sensing signal transmission by using the line of sight (LOS). However, most of the traditional localization methods are not available for the new deployment mode. In this paper, we propose the self-localization of beacons method based on the Cayley-Menger determinant, which can determine the positions of beacons stuck in the ceiling; and differential sensitivity analysis (DSA) is also applied to eliminate measurement errors in measurement data fusion. Then, the calibration of beacons scheme is proposed to further refine the locations of beacons by the mobile robot. According to the robot's motion model based on dead reckoning, which is the process of determining one's current position, we employ the H∞ filter and the strong tracking filter (STF) to calibrate the rough locations, respectively. Lastly, the optimal node selection scheme based on geometric dilution precision (GDOP) is presented here, which is able to pick the group of beacons with the minimum GDOP from all of the beacons. Then, we propose the GDOP-based weighting estimation method (GWEM) to associate redundant information with the position of the target. To verify the proposed methods in the paper, we design and conduct a simulation and an experiment in an indoor setting. Compared to EKF and the H∞ filter, the adopted STF method can more effectively calibrate the locations of beacons; GWEM can provide centimeter-level precision in 3D environments by using the combination of beacons that minimizes GDOP.
室内定位是无线传感器网络(WSN)中的一个重要研究领域。一般来说,无线传感器网络的节点与待定位目标部署在同一平面,即地面上,这会导致传感信号受到诸如家具等不可预测障碍物的影响甚至被阻挡。然而,像Cricket这样的三维系统可以最大程度地减少障碍物的负面影响,并通过使用视线(LOS)保证传感信号的传输。然而,大多数传统定位方法不适用于这种新的部署模式。在本文中,我们提出了基于凯莱 - 门格行列式的信标自定位方法,该方法可以确定粘贴在天花板上的信标的位置;并且还应用了差分灵敏度分析(DSA)来消除测量数据融合中的测量误差。然后,提出了信标校准方案,通过移动机器人进一步优化信标的位置。根据基于航位推算的机器人运动模型(即确定自身当前位置的过程),我们分别采用H∞滤波器和强跟踪滤波器(STF)来校准粗略位置。最后,提出了基于几何精度衰减因子(GDOP)的最优节点选择方案,该方案能够从所有信标中挑选出GDOP最小的信标组。然后,我们提出了基于GDOP的加权估计方法(GWEM),将冗余信息与目标位置相关联。为了验证本文提出的方法,我们在室内环境中设计并进行了仿真和实验。与扩展卡尔曼滤波器(EKF)和H∞滤波器相比,所采用的STF方法能够更有效地校准信标的位置;GWEM通过使用使GDOP最小化的信标组合,可以在三维环境中提供厘米级的精度。