Akanyeti O, Thornycroft P J M, Lauder G V, Yanagitsuru Y R, Peterson A N, Liao J C
Whitney Laboratory for Marine Bioscience, Department of Biology, University of Florida, Gainesville, Florida 3261, USA.
Department of Organismic and Evolutionary Biology, Harvard University, Cambridge, Massachusetts 02138, USA.
Nat Commun. 2016 Mar 24;7:11044. doi: 10.1038/ncomms11044.
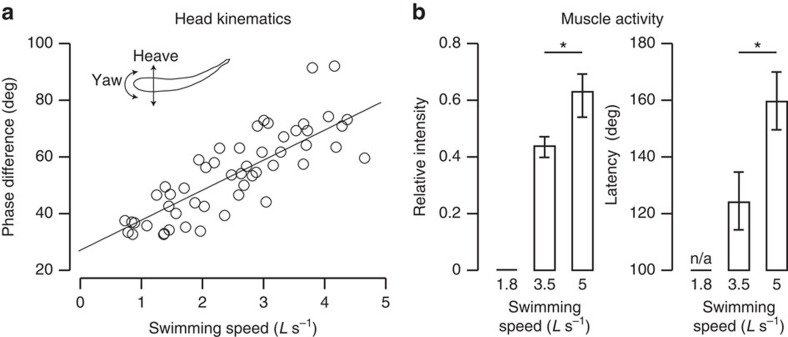
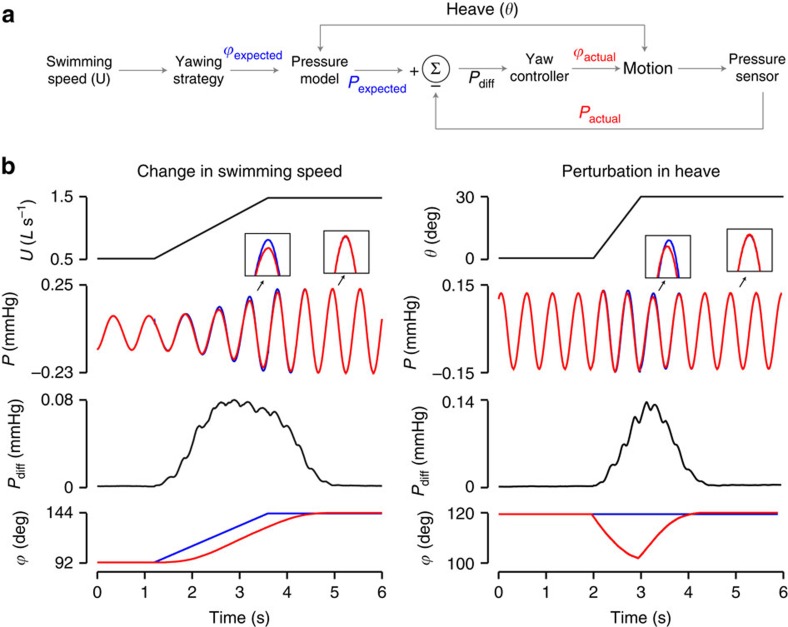
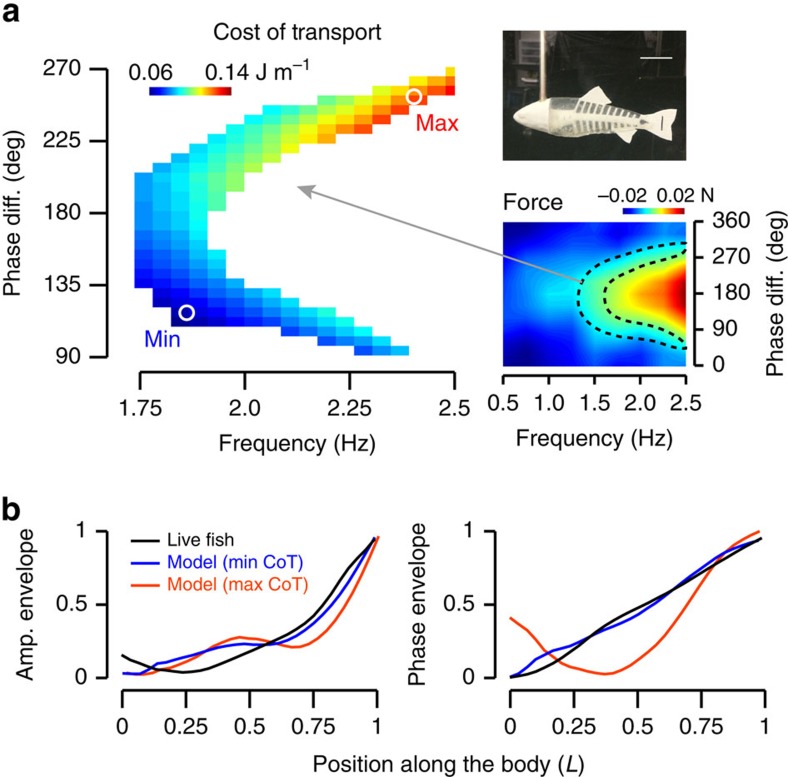
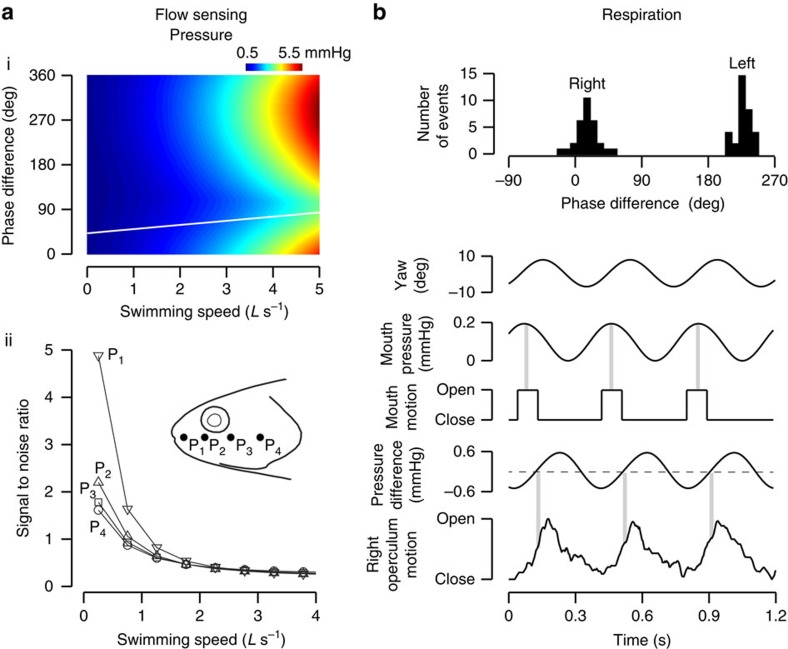
Previous work in fishes considers undulation as a means of propulsion without addressing how it may affect other functions such as sensing and respiration. Here we show that undulation can optimize propulsion, flow sensing and respiration concurrently without any apparent tradeoffs when head movements are coupled correctly with the movements of the body. This finding challenges a long-held assumption that head movements are simply an unintended consequence of undulation, existing only because of the recoil of an oscillating tail. We use a combination of theoretical, biological and physical experiments to reveal the hydrodynamic mechanisms underlying this concerted optimization. Based on our results we develop a parsimonious control architecture that can be used by both undulatory animals and machines in dynamic environments.
以往对鱼类的研究将波动视为一种推进方式,却未探讨其如何影响其他功能,如感知和呼吸。在此我们表明,当头部运动与身体运动正确耦合时,波动可同时优化推进、水流感知和呼吸,且无明显权衡。这一发现挑战了长期以来的假设,即头部运动仅仅是波动的意外结果,只是由于摆动尾巴的反冲而存在。我们结合理论、生物学和物理实验,揭示这种协同优化背后的流体动力学机制。基于我们的结果,我们开发了一种简约的控制架构,波动动物和动态环境中的机器均可使用。