Song Yi, Dai Zhendong, Wang Zhouyi, Ji Aihong, Gorb Stanislav N
Institute of Bio-inspired Structure and Surface Engineering, Nanjing University of Aeronautics and Astronautics, 29 Yudao Street, 210016, Nanjing, China.
College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, 29 Yudao Street, 210016, Nanjing, China.
Sci Rep. 2016 May 20;6:26219. doi: 10.1038/srep26219.
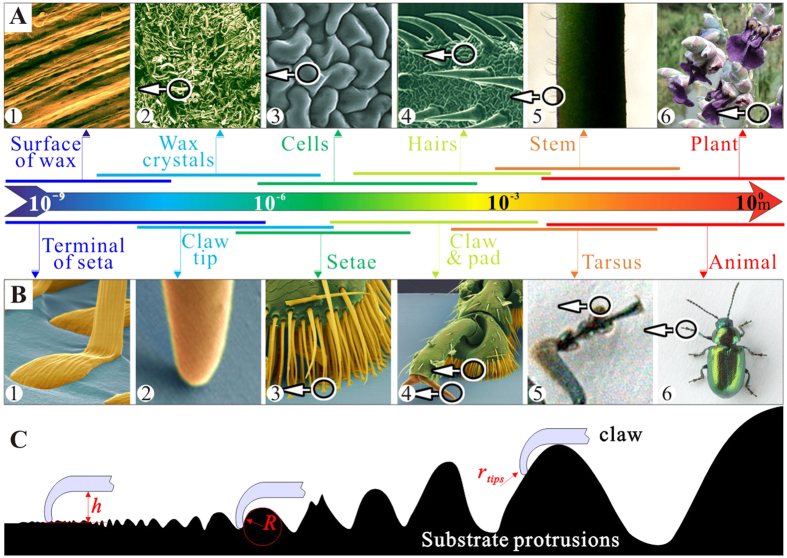
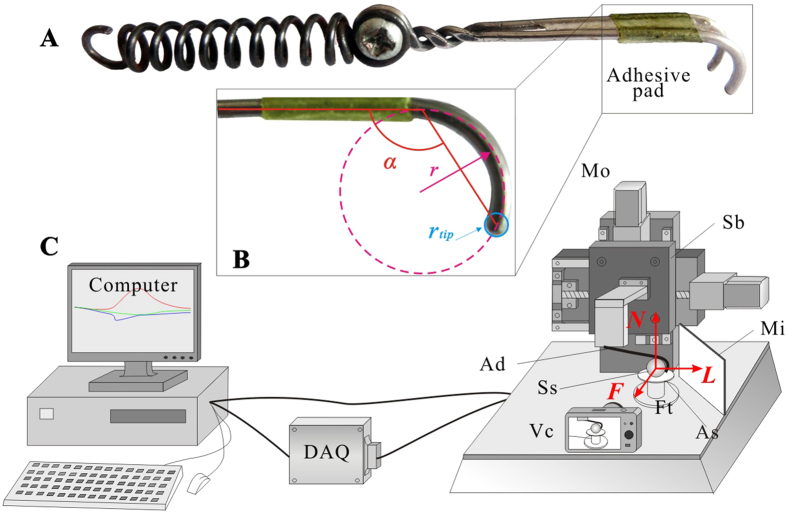
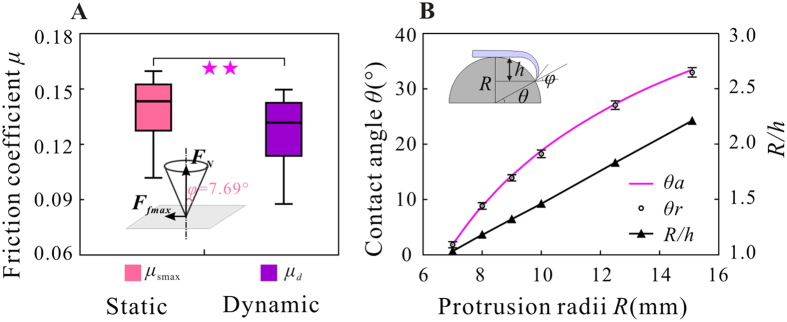
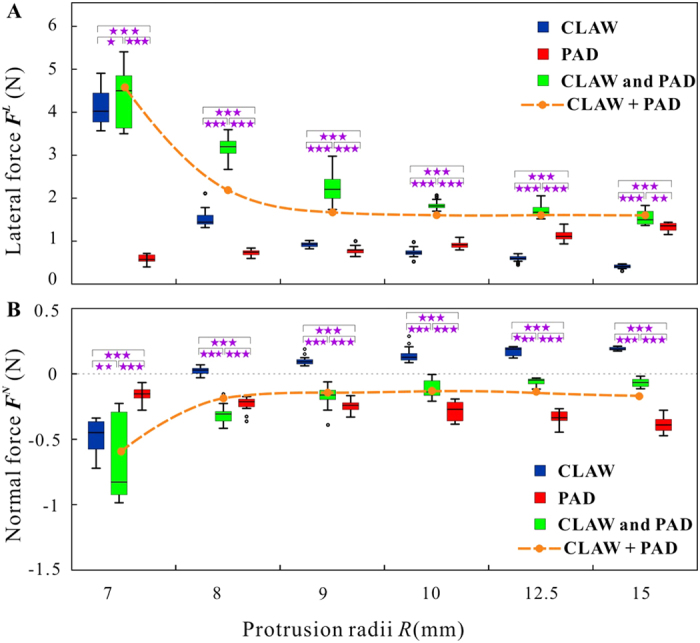
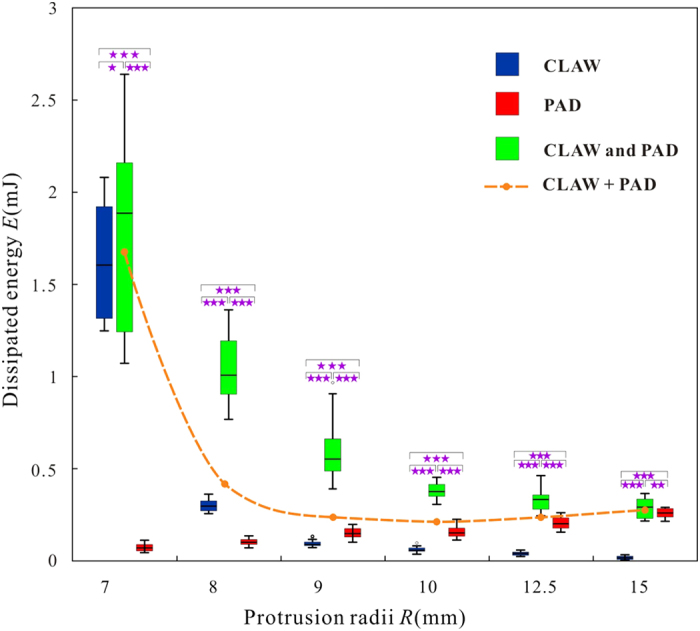
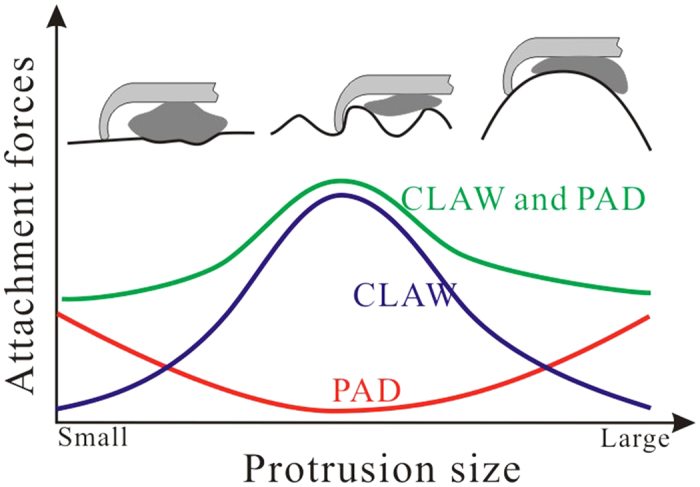
To attach reliably on various inclined rough surfaces, many insects have evolved both claws and adhesive pads on their feet. However, the interaction between these organs still remains unclear. Here we designed an artificial attachment device, which mimics the structure and function of claws and adhesive pads, and tested it on stiff spheres of different dimensions. The results show that the attachment forces of claws decrease with an increase of the sphere radius. The forces may become very strong, when the sphere radius is smaller or comparable to the claw radius, because of the frictional self-lock. On the other hand, adhesive pads generate considerable adhesion on large sphere diameter due to large contact areas. The synergy effect between the claws and adhesive pads leads to much stronger attachment forces, if compared to the action of claw or adhesive pads independently (or even to the sum of both). The results carried out by our insect-inspired artificial attachment device clearly demonstrate why biological evolution employed two attachment organs working in concert. The results may greatly inspire the robot design, to obtain reliable attachment forces on various substrates.
为了可靠地附着在各种倾斜的粗糙表面上,许多昆虫在其脚上进化出了爪子和黏附垫。然而,这些器官之间的相互作用仍不清楚。在此,我们设计了一种人工附着装置,它模仿爪子和黏附垫的结构与功能,并在不同尺寸的刚性球体上进行了测试。结果表明,爪子的附着力随着球体半径的增加而减小。当球体半径小于或与爪子半径相当时,由于摩擦自锁,附着力可能会变得非常强。另一方面,黏附垫由于接触面积大,在大球体直径上产生相当大的黏附力。与爪子或黏附垫单独作用(甚至两者之和)相比,爪子和黏附垫之间的协同效应会产生更强的附着力。我们受昆虫启发设计的人工附着装置所得到的结果清楚地表明了生物进化为何采用两个协同工作的附着器官。这些结果可能会极大地启发机器人设计,以便在各种基板上获得可靠的附着力。