Wang Yunsheng, Weinacker Holger, Koch Barbara
Dept. of Remote Sensing and Landscape Information Systems, University of Freiburg, Germany.
Sensors (Basel). 2008 Jun 12;8(6):3938-3951. doi: 10.3390/s8063938.
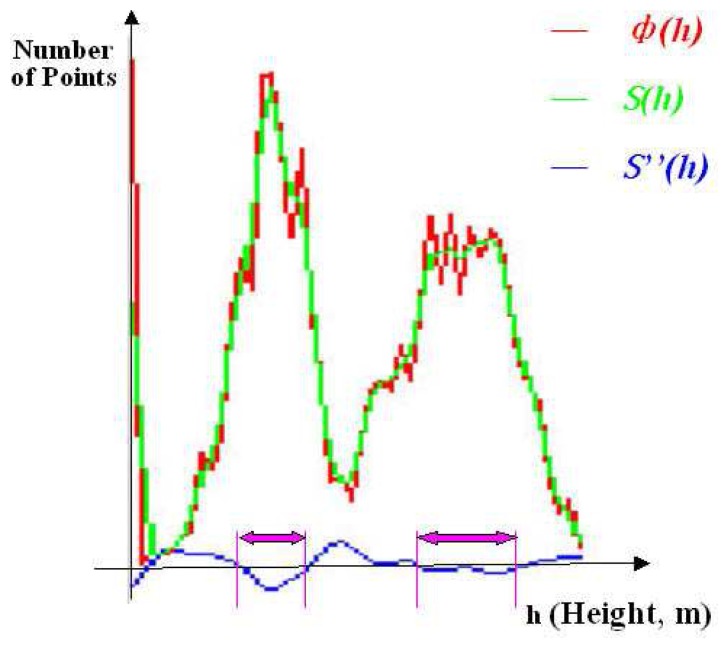
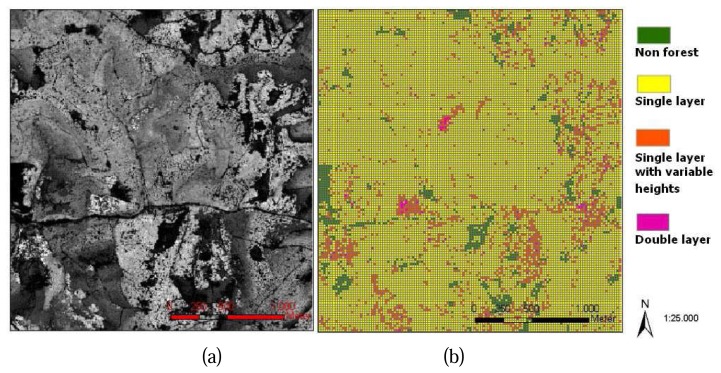
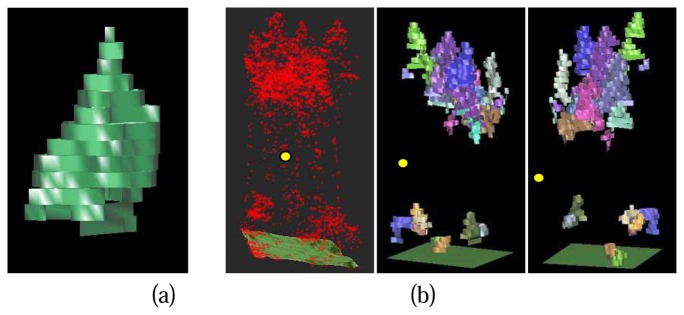
A procedure for both vertical canopy structure analysis and 3D single tree modelling based on Lidar point cloud is presented in this paper. The whole area of research is segmented into small study cells by a raster net. For each cell, a normalized point cloud whose point heights represent the absolute heights of the ground objects is generated from the original Lidar raw point cloud. The main tree canopy layers and the height ranges of the layers are detected according to a statistical analysis of the height distribution probability of the normalized raw points. For the 3D modelling of individual trees, individual trees are detected and delineated not only from the top canopy layer but also from the sub canopy layer. The normalized points are resampled into a local voxel space. A series of horizontal 2D projection images at the different height levels are then generated respect to the voxel space. Tree crown regions are detected from the projection images. Individual trees are then extracted by means of a pre-order forest traversal process through all the tree crown regions at the different height levels. Finally, 3D tree crown models of the extracted individual trees are reconstructed. With further analyses on the 3D models of individual tree crowns, important parameters such as crown height range, crown volume and crown contours at the different height levels can be derived.
本文提出了一种基于激光雷达点云的垂直冠层结构分析和三维单木建模方法。研究区域通过栅格网划分为小的研究单元。对于每个单元,从原始激光雷达原始点云中生成归一化点云,其点高度代表地面物体的绝对高度。根据归一化原始点高度分布概率的统计分析,检测主要树冠层及其高度范围。对于单木的三维建模,不仅从顶部树冠层,而且从亚树冠层检测和勾勒单木。将归一化点重新采样到局部体素空间。然后相对于体素空间生成不同高度水平的一系列水平二维投影图像。从投影图像中检测树冠区域。然后通过对不同高度水平的所有树冠区域进行前序森林遍历过程来提取单木。最后,重建提取的单木的三维树冠模型。通过对单木树冠三维模型的进一步分析,可以得出树冠高度范围、树冠体积和不同高度水平的树冠轮廓等重要参数。