Ji Zhangping, Zhu Hui, Liu Huicong, Liu Nan, Chen Tao, Yang Zhan, Sun Lining
School of Mechanical and Electric Engineering, Collaborative Innovation Center of Suzhou Nano Science and Technology, Jiangsu Provincial Key Laboratory of Advanced Robotics, Soochow University, Suzhou 215000, China.
Sensors (Basel). 2016 Nov 25;16(12):2001. doi: 10.3390/s16122001.
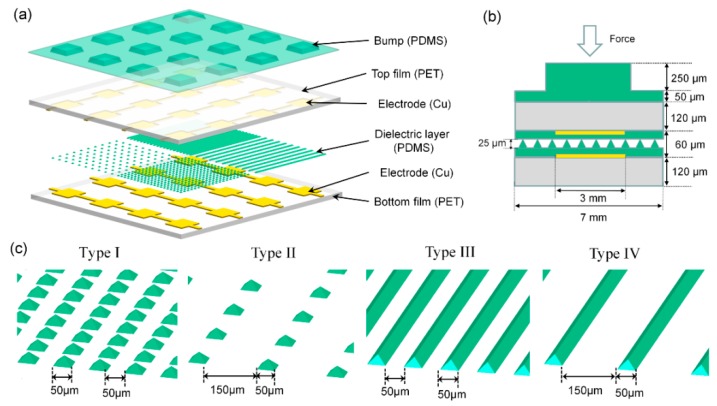
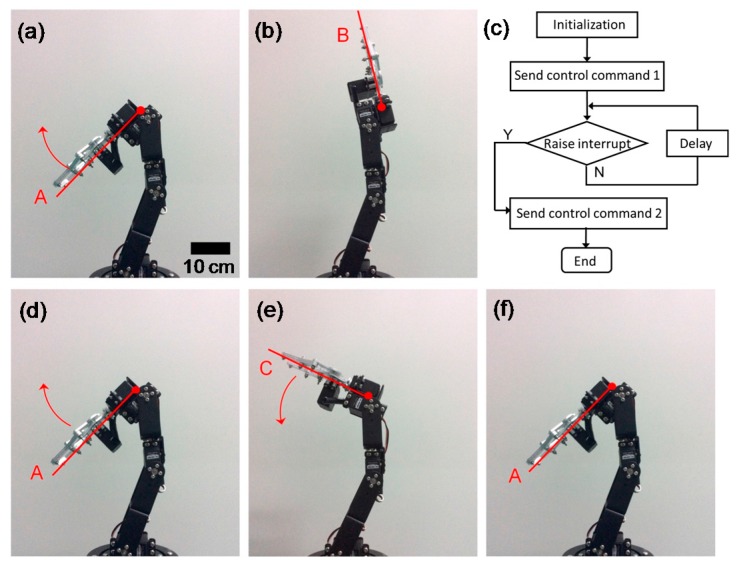
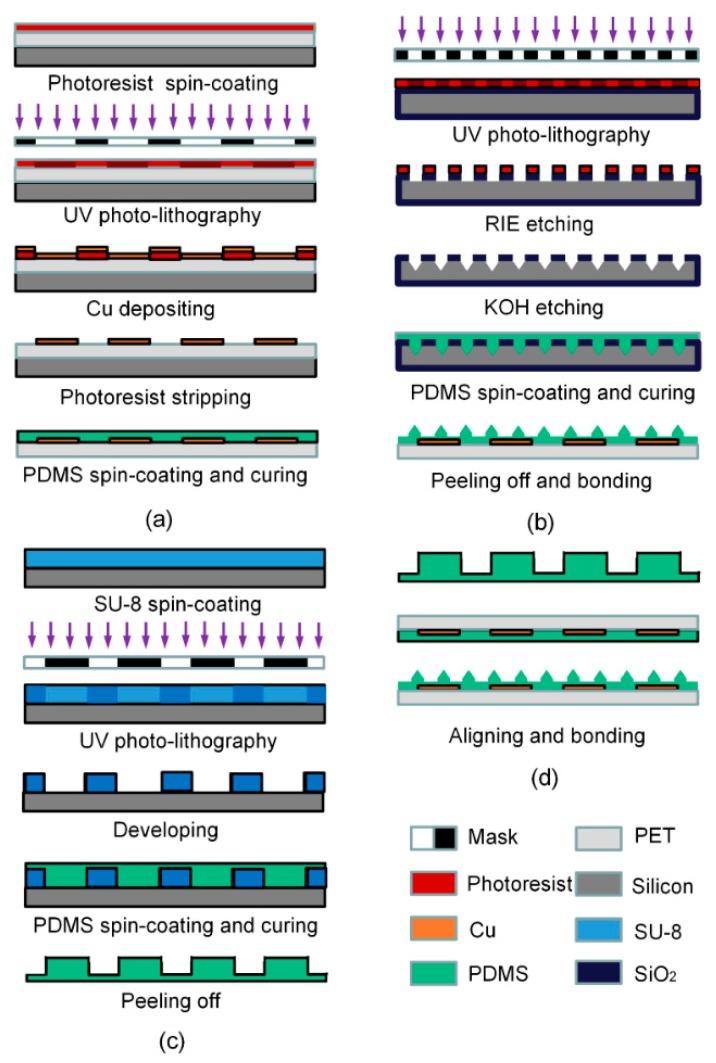
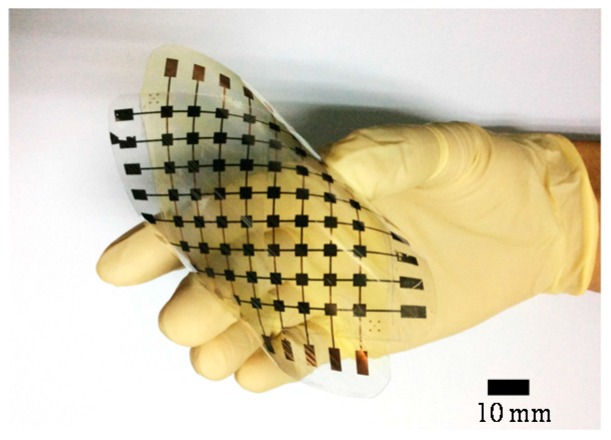
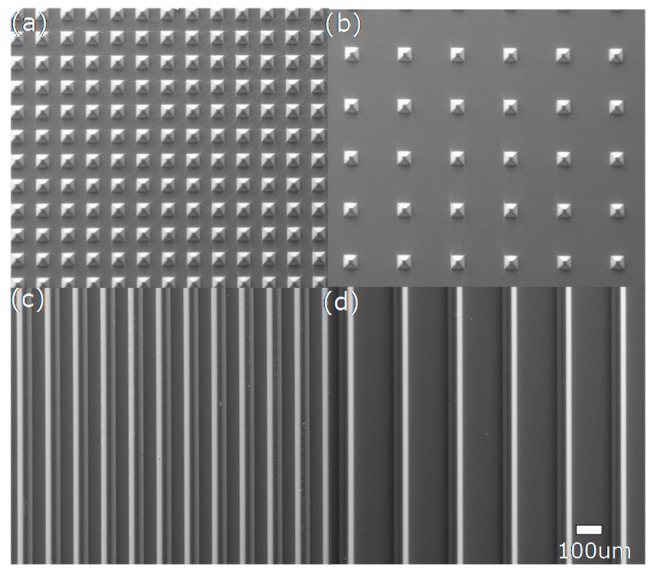
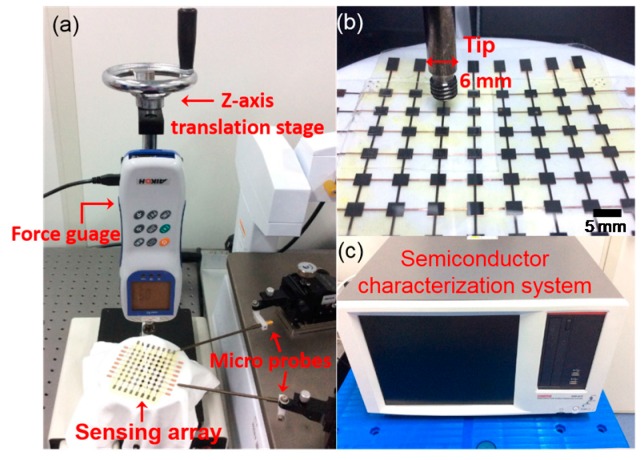
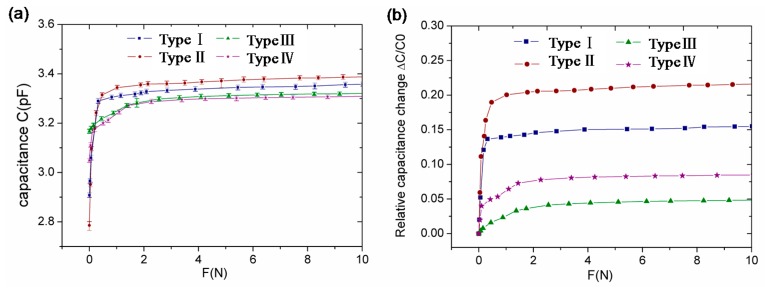
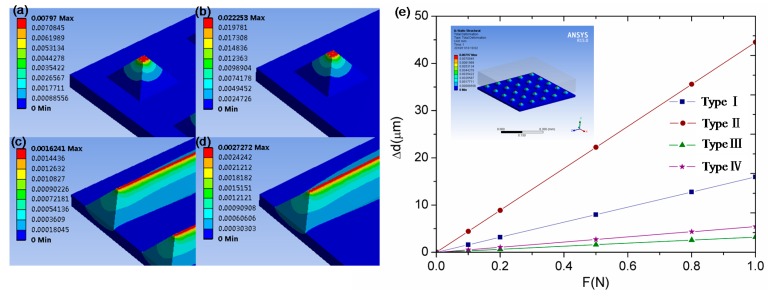
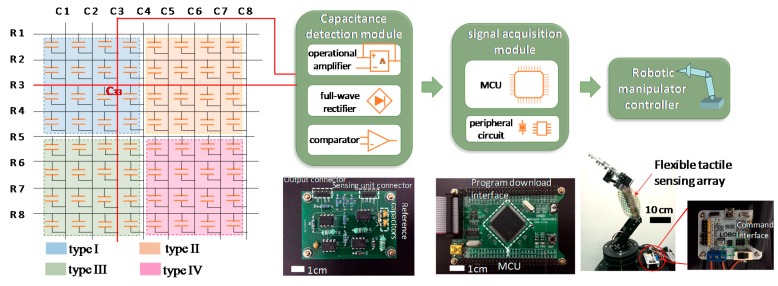
In this study, a flexible tactile sensing array based on a capacitive mechanism was designed, fabricated, and characterized for sensitive robot skin. A device with 8 × 8 sensing units was composed of top and bottom flexible polyethyleneterephthalate (PET) substrates with copper (Cu) electrodes, a polydimethylsiloxane (PDMS) dielectric layer, and a bump contact layer. Four types of microstructures (i.e., pyramids and V-shape grooves) atop a PDMS dielectric layer were well-designed and fabricated to enhance tactile sensitivity. The optimal sensing unit achieved a high sensitivity of 35.9%/N in a force range of 0-1 N. By incorporating a tactile feedback control system, the flexible sensing array as the sensitive skin of a robotic manipulator demonstrated a potential capability of robotic obstacle avoidance.
在本研究中,设计、制造并表征了一种基于电容机制的柔性触觉传感阵列,用于灵敏的机器人皮肤。一个具有8×8个传感单元的器件由带有铜(Cu)电极的顶部和底部柔性聚对苯二甲酸乙二酯(PET)基板、聚二甲基硅氧烷(PDMS)介电层和凸点接触层组成。在PDMS介电层顶部精心设计并制造了四种类型的微结构(即金字塔形和V形凹槽),以提高触觉灵敏度。最佳传感单元在0至1 N的力范围内实现了35.9%/N的高灵敏度。通过集成触觉反馈控制系统,作为机器人操纵器灵敏皮肤的柔性传感阵列展示了机器人避障的潜在能力。