Armanini C, Dal Corso F, Misseroni D, Bigoni D
DICAM , University of Trento , via Mesiano 77, 38123 Trento, Italy.
Proc Math Phys Eng Sci. 2017 Feb;473(2198):20160870. doi: 10.1098/rspa.2016.0870. Epub 2017 Feb 22.
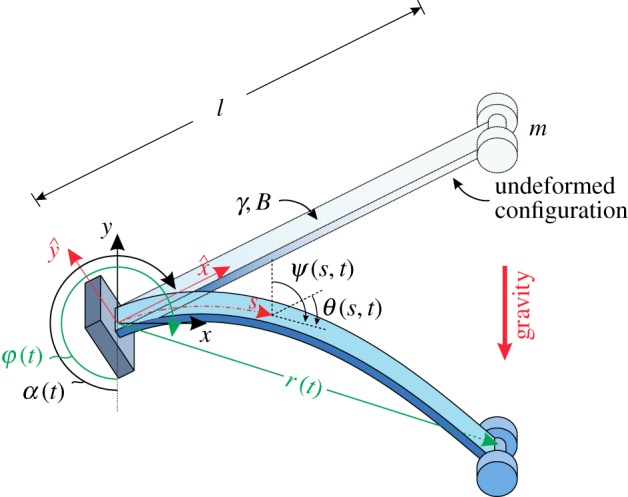
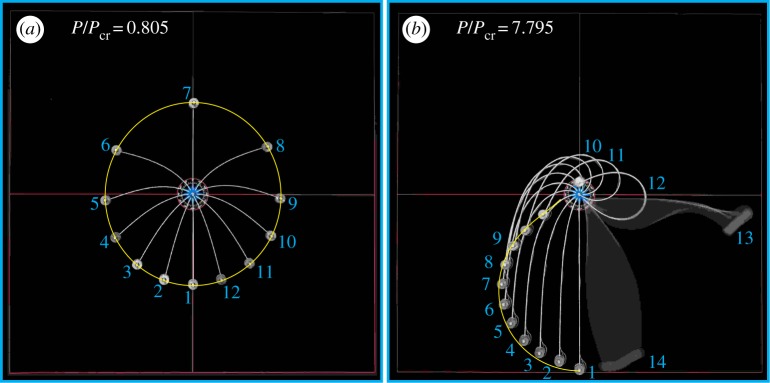
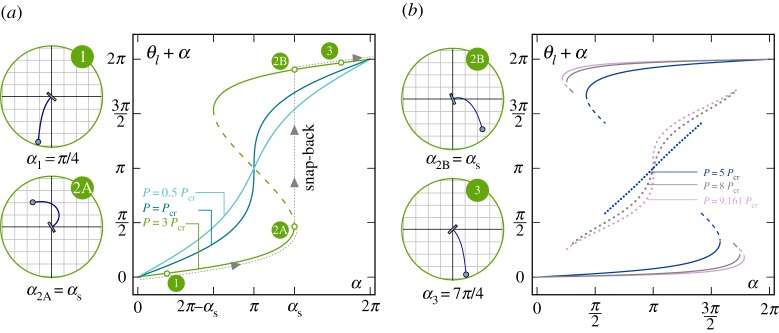
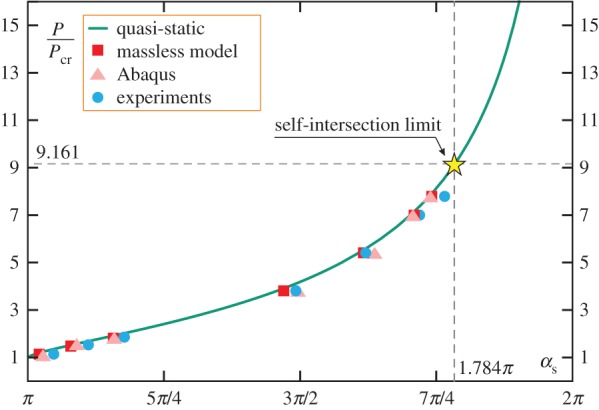
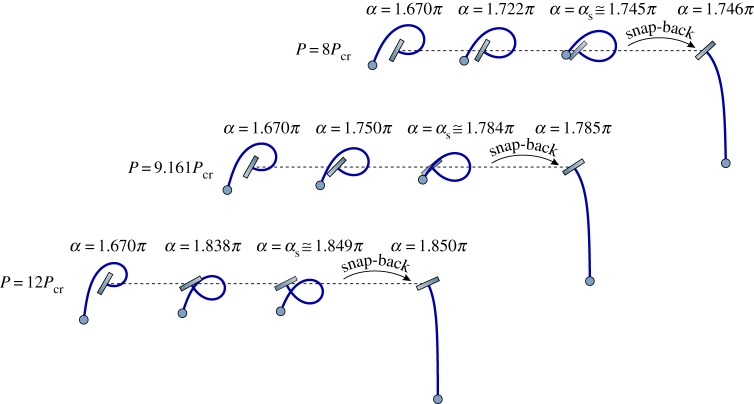
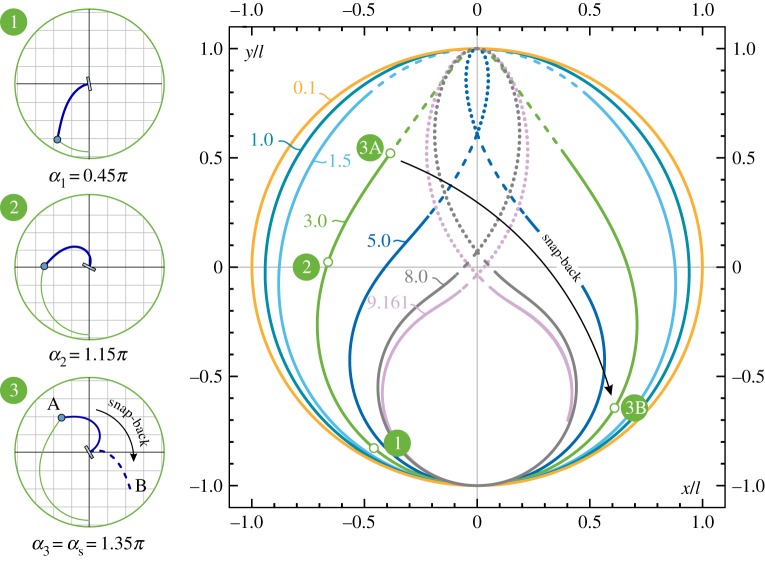
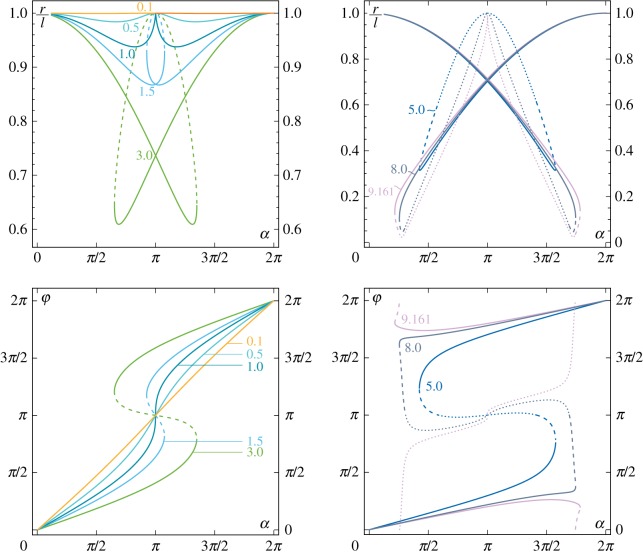
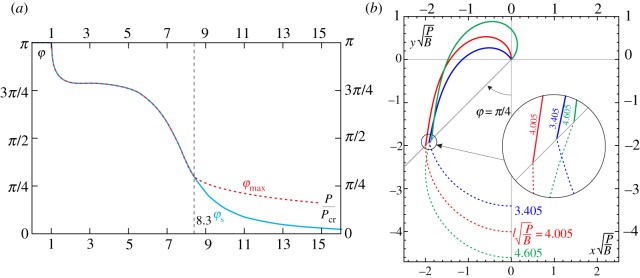
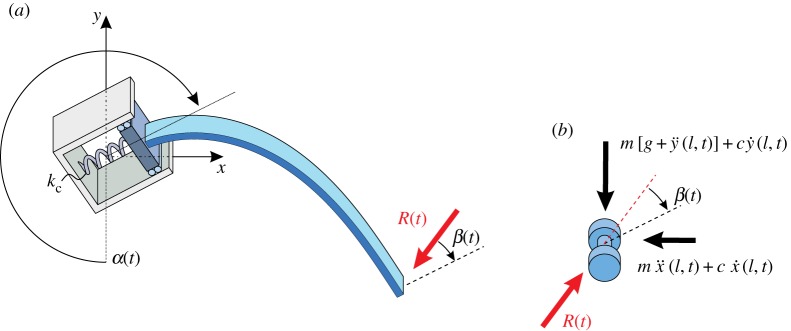
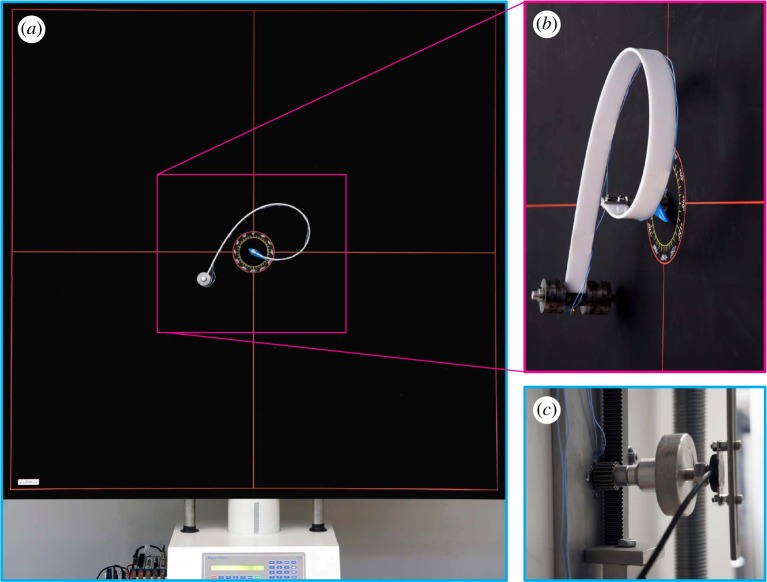
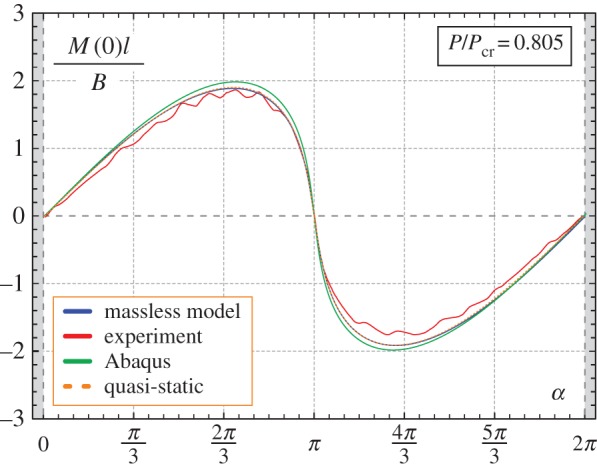
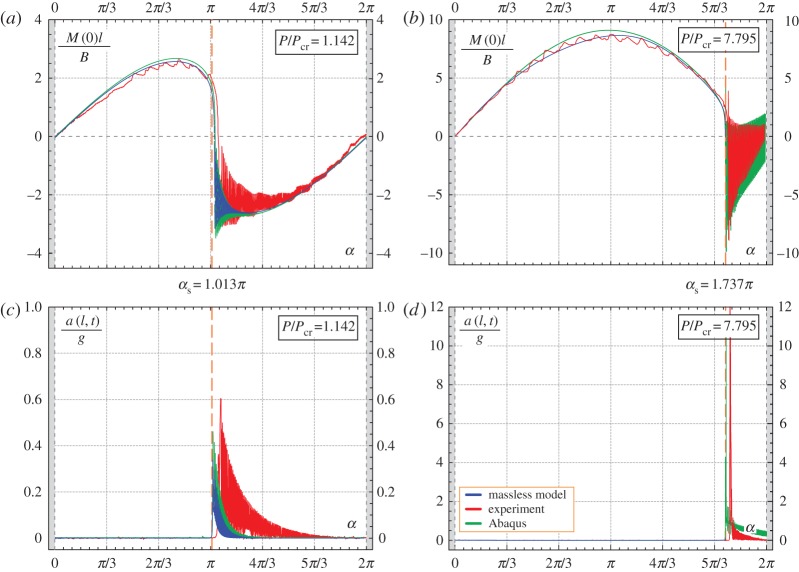
An elastic rod is clamped at one end and has a dead load attached to the other (free) end. The rod is then slowly rotated using the clamp. When the load is smaller than the buckling value, the rod describes a continuous set of quasi-static forms and its end traces a (smooth, convex and simple) closed curve, which would be a circle if the rod were rigid. The closed curve is analytically determined through the integration of the Euler's elastica, so that for sufficiently small loads the mechanical system behaves as an 'elastica compass'. For loads higher than that of buckling, the elastica reaches a configuration from which a snap-back instability occurs, realizing a sort of 'elastica catapult'. The whole quasi-static evolution leading to the critical configuration for snapping is calculated through the elastica and the subsequent dynamic motion simulated using two numerical procedures, one developed and another based on a finite-element scheme. The theoretical results are then validated on a specially designed and built apparatus. An obvious application of the present model would be in the development of soft robotic limbs, but the results are also of interest for the optimization analysis in pole vaulting.
一根弹性杆一端被夹紧,另一端(自由端)附有一个恒载。然后通过夹具缓慢旋转该杆。当载荷小于屈曲值时,杆呈现出一系列连续的准静态形状,其端部描绘出一条(光滑、凸且简单的)封闭曲线,如果杆是刚性的,这条曲线将是一个圆。通过对欧拉弹性曲线进行积分来解析确定这条封闭曲线,因此对于足够小的载荷,机械系统表现为一个“弹性罗盘”。对于高于屈曲载荷的情况,弹性曲线达到一种配置,从该配置会发生回跳不稳定性,实现一种“弹性弹射器”。通过弹性曲线计算导致 snapping 临界配置的整个准静态演化过程,并使用两种数值方法模拟随后的动态运动,一种是自行开发的,另一种基于有限元方案。然后在专门设计和制造的装置上验证理论结果。本模型的一个明显应用将是在软机器人肢体的开发中,但这些结果对于撑杆跳的优化分析也很有意义。