Pizarro Oscar, Friedman Ariell, Bryson Mitch, Williams Stefan B, Madin Joshua
Australian Centre for Field Robotics University of Sydney Sydney NSW Australia.
Greybits Pty Ltd Sydney NSW Australia.
Ecol Evol. 2017 Feb 15;7(6):1770-1782. doi: 10.1002/ece3.2701. eCollection 2017 Mar.
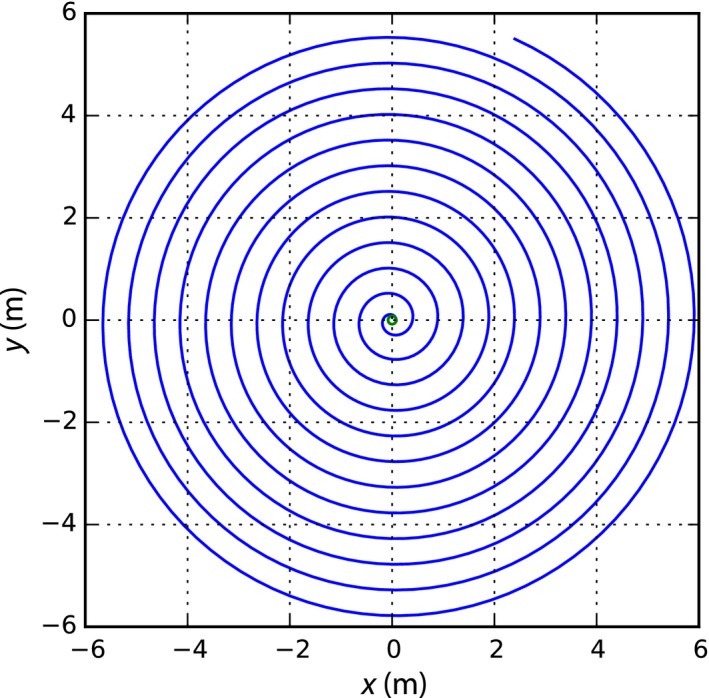
Visual 3D reconstruction techniques provide rich ecological and habitat structural information from underwater imagery. However, an unaided swimmer or diver struggles to navigate precisely over larger extents with consistent image overlap needed for visual reconstruction. While underwater robots have demonstrated systematic coverage of areas much larger than the footprint of a single image, access to suitable robotic systems is limited and requires specialized operators. Furthermore, robots are poor at navigating hydrodynamic habitats such as shallow coral reefs. We present a simple approach that constrains the motion of a swimmer using a line unwinding from a fixed central drum. The resulting motion is the involute of a circle, a spiral-like path with constant spacing between revolutions. We test this survey method at a broad range of habitats and hydrodynamic conditions encircling Lizard Island in the Great Barrier Reef, Australia. The approach generates fast, structured, repeatable, and large-extent surveys (~110 m in 15 min) that can be performed with two people and are superior to the commonly used "mow the lawn" method. The amount of image overlap is a design parameter, allowing for surveys that can then be reliably used in an automated processing pipeline to generate 3D reconstructions, orthographically projected mosaics, and structural complexity indices. The individual images or full mosaics can also be labeled for benthic diversity and cover estimates. The survey method we present can serve as a standard approach to repeatedly collecting underwater imagery for high-resolution 2D mosaics and 3D reconstructions covering spatial extents much larger than a single image footprint without requiring sophisticated robotic systems or lengthy deployment of visual guides. As such, it opens up cost-effective novel observations to inform studies relating habitat structure to ecological processes and biodiversity at scales and spatial resolutions not readily available previously.
视觉三维重建技术可从水下图像中提供丰富的生态和栖息地结构信息。然而,仅靠游泳者或潜水员在较大范围内精确导航并保持视觉重建所需的一致图像重叠是很困难的。虽然水下机器人已证明能够系统地覆盖比单个图像覆盖范围大得多的区域,但获得合适的机器人系统受到限制,且需要专业操作人员。此外,机器人在诸如浅珊瑚礁等水动力环境中导航能力较差。我们提出了一种简单的方法,即使用从固定中心滚筒展开的绳索来约束游泳者的运动。由此产生的运动是圆的渐开线,是一种每圈之间间距恒定的螺旋状路径。我们在澳大利亚大堡礁蜥蜴岛周围的广泛栖息地和水动力条件下测试了这种测量方法。该方法能快速、有组织、可重复且大范围地进行测量(15分钟内约110米),只需两个人就能完成,且优于常用的“割草”方法。图像重叠量是一个设计参数,可用于进行后续能可靠地用于自动处理流程以生成三维重建、正射投影镶嵌图和结构复杂性指数的测量。单个图像或完整镶嵌图也可用于标记底栖生物多样性和覆盖度估计。我们提出的测量方法可作为一种标准方法,用于反复收集水下图像,以生成高分辨率二维镶嵌图和三维重建,覆盖的空间范围比单个图像覆盖范围大得多,而无需复杂的机器人系统或长时间部署视觉引导。因此,它开辟了具有成本效益的新观测方法,为在以前难以获得的尺度和空间分辨率下研究栖息地结构与生态过程及生物多样性之间的关系提供信息。