Goher K M, Fadlallah S O
Department of Informatics and Enabling Technologies, Lincoln University, Lincoln, New Zealand.
Mechanical Engineering Department, Auckland University of Technology, Auckland, New Zealand.
Robotics Biomim. 2017;4(1):1. doi: 10.1186/s40638-017-0057-3. Epub 2017 Mar 23.
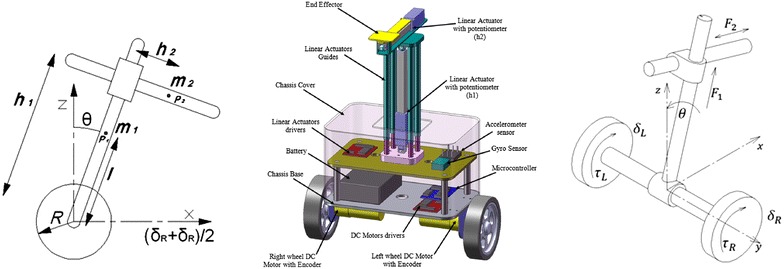
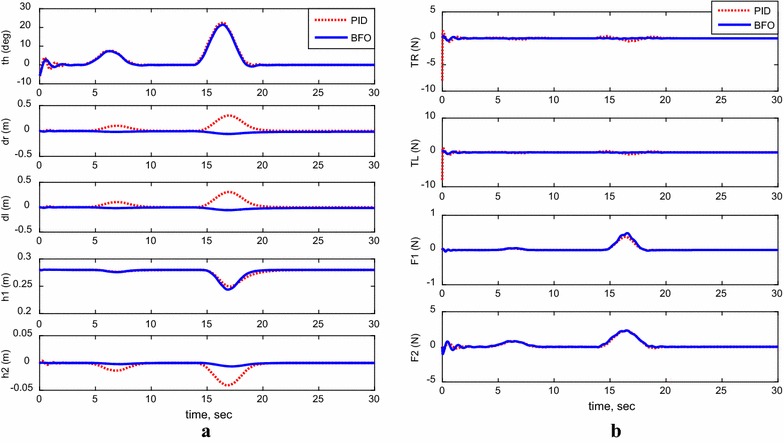
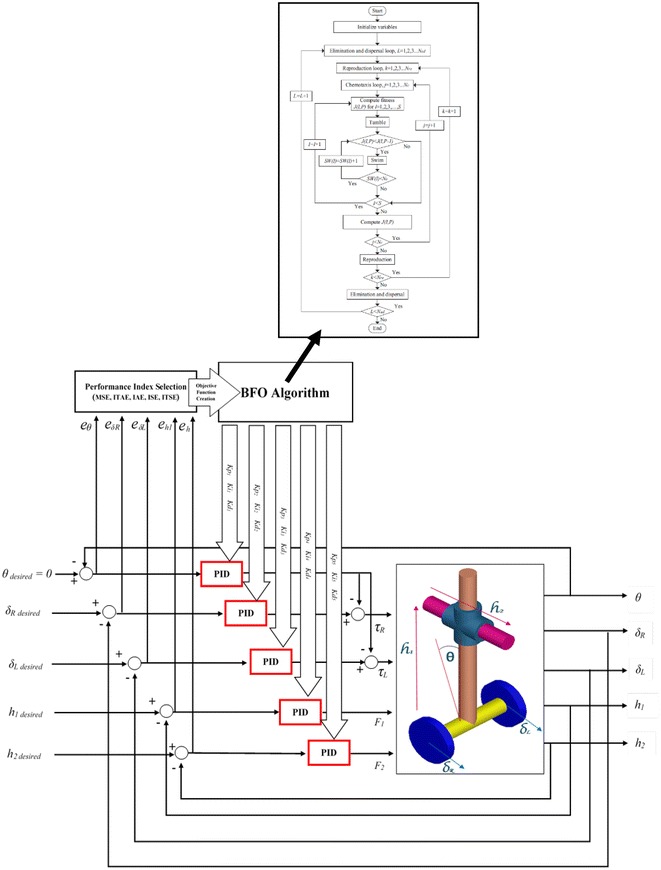
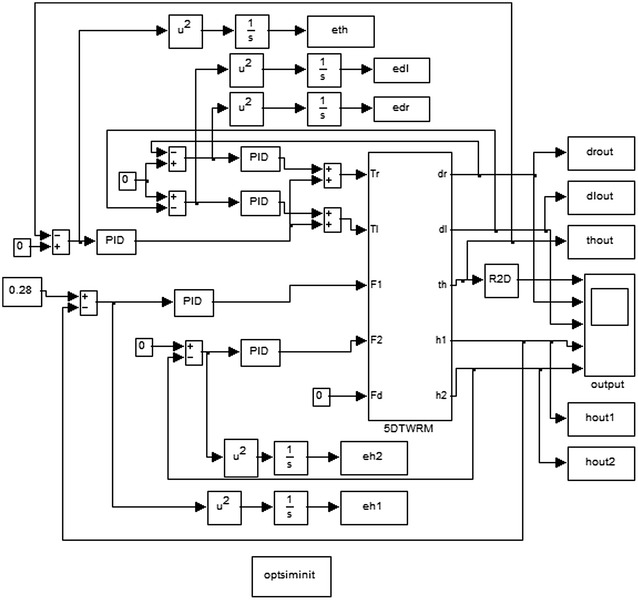
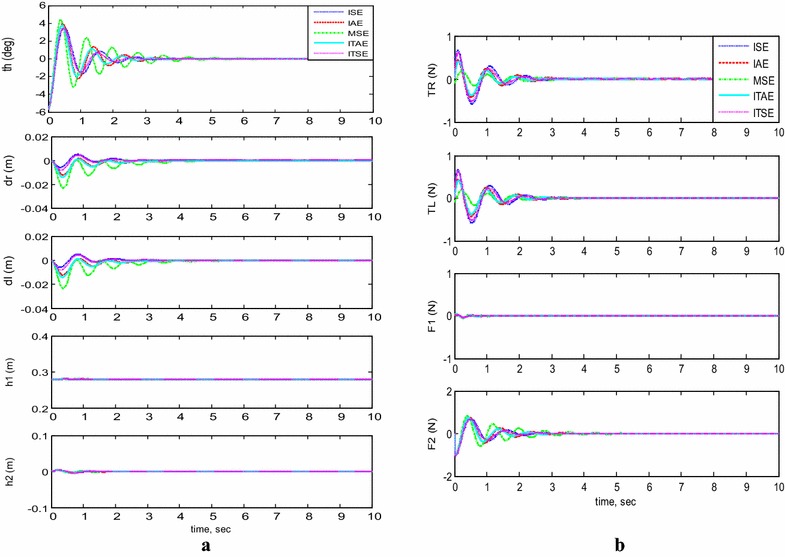
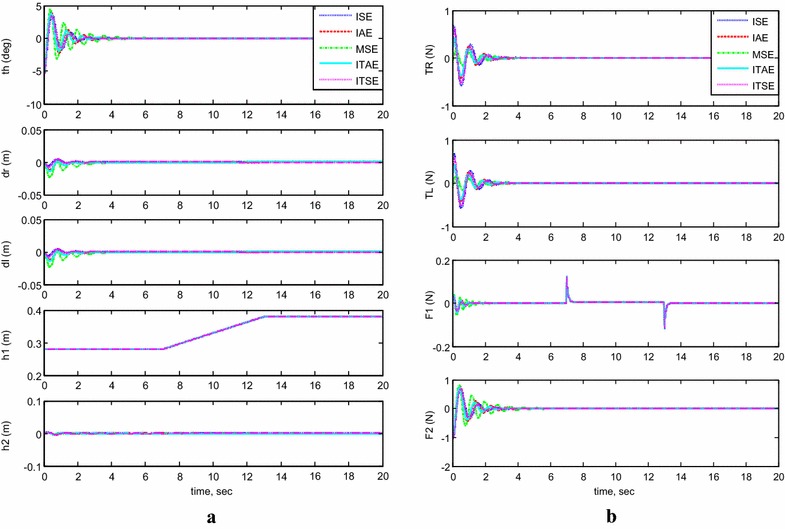
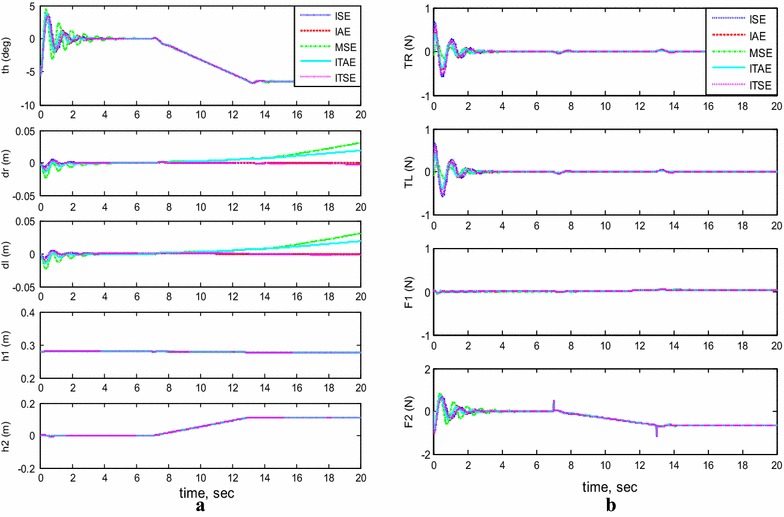
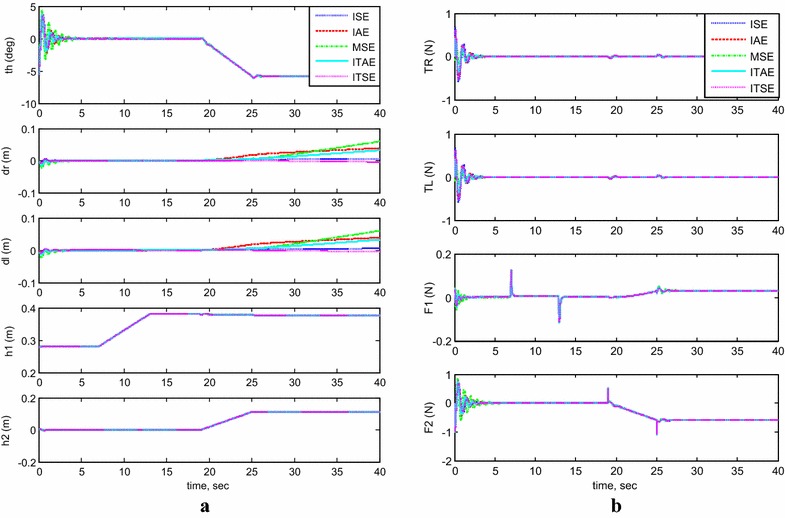
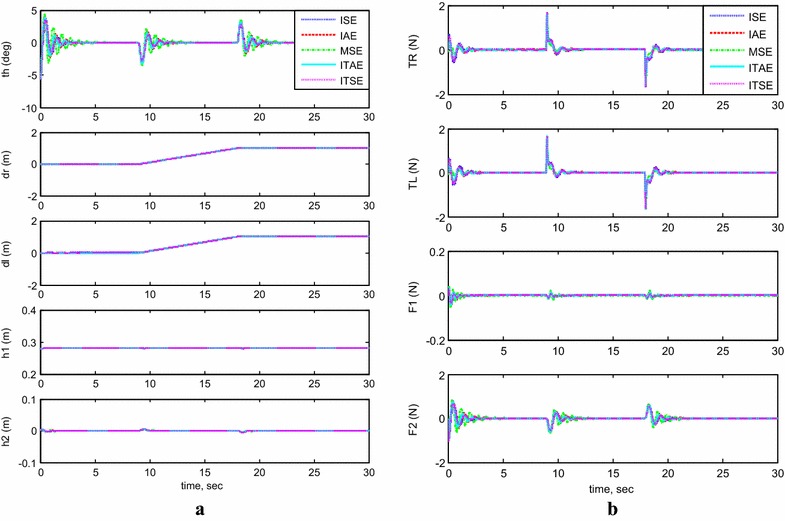
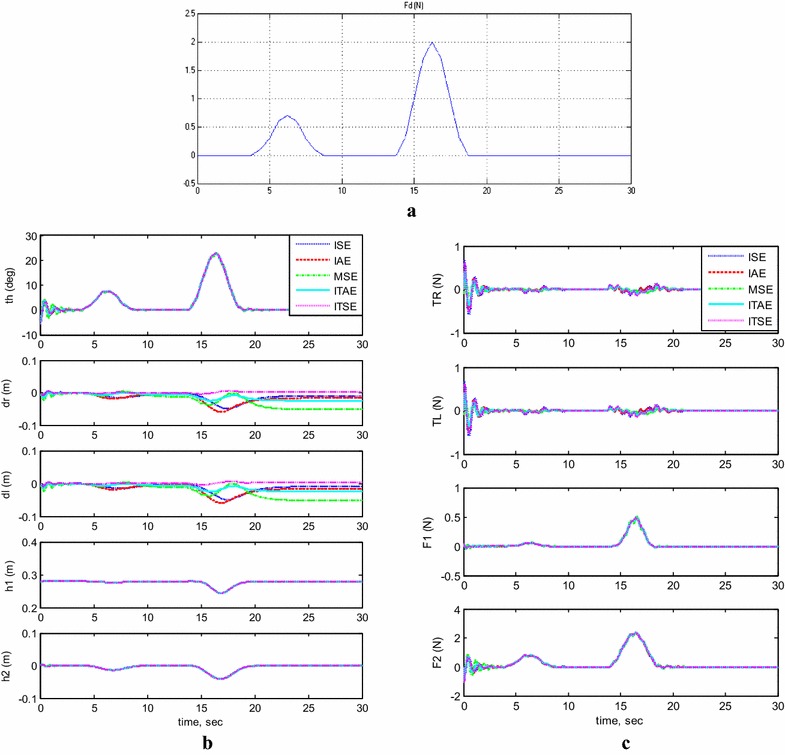
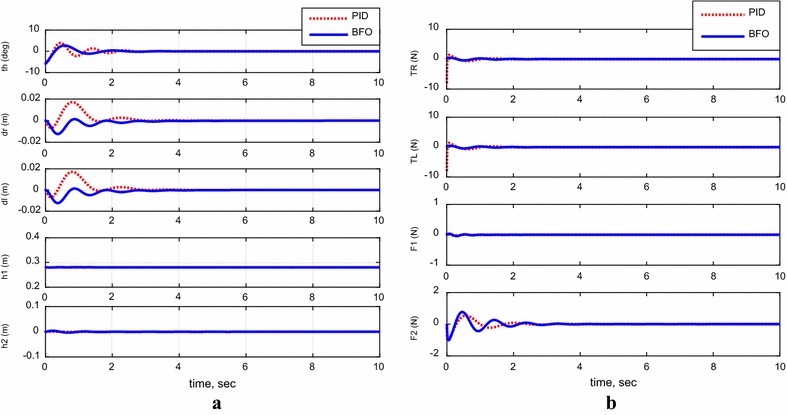
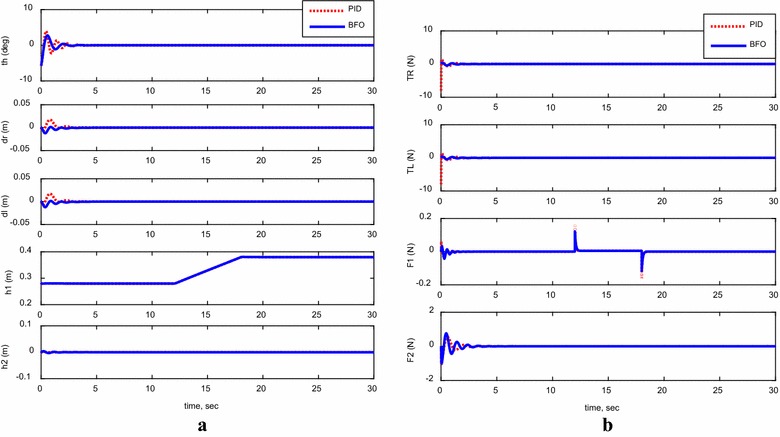
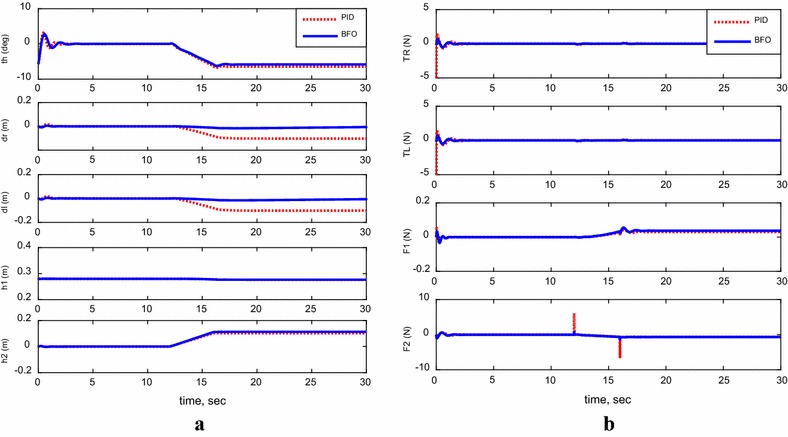
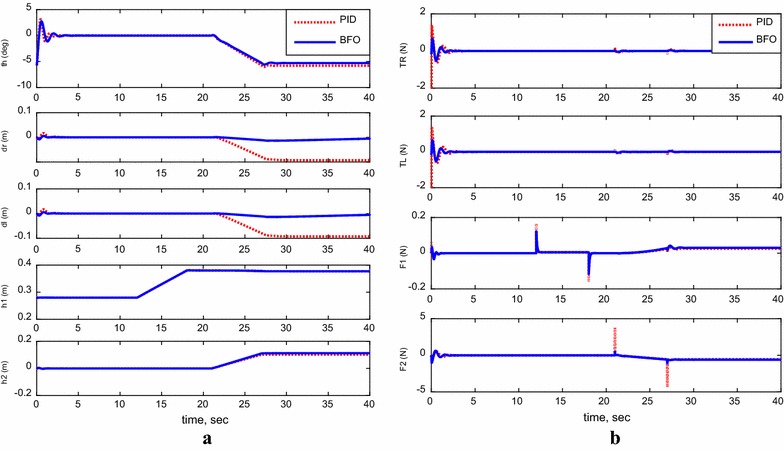
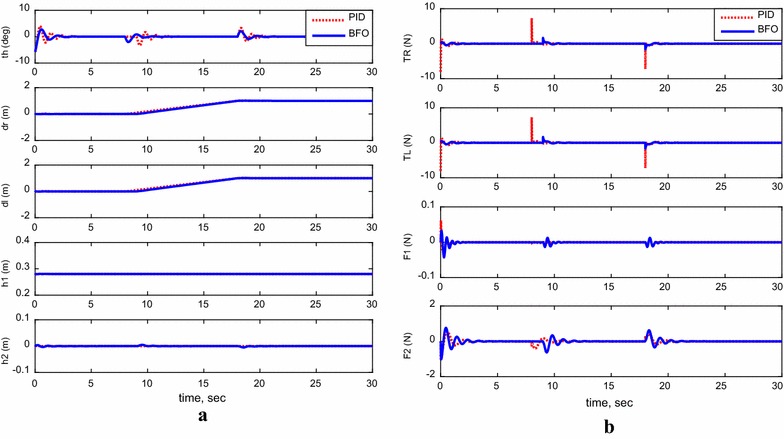
This paper presents the performance of utilizing a bacterial foraging optimization algorithm on a PID control scheme for controlling a five DOF two-wheeled robotic machine with two-directional handling mechanism. The system under investigation provides solutions for industrial robotic applications that require a limited-space working environment. The system nonlinear mathematical model, derived using Lagrangian modeling approach, is simulated in MATLAB/Simulink environment. Bacterial foraging-optimized PID control with decoupled nature is designed and implemented. Various working scenarios with multiple initial conditions are used to test the robustness and the system performance. Simulation results revealed the effectiveness of the bacterial foraging-optimized PID control method in improving the system performance compared to the PID control scheme.
本文介绍了在一种具有双向操纵机构的五自由度两轮机器人机器的PID控制方案上利用细菌觅食优化算法的性能。所研究的系统为需要有限空间工作环境的工业机器人应用提供了解决方案。使用拉格朗日建模方法推导的系统非线性数学模型在MATLAB/Simulink环境中进行了仿真。设计并实现了具有解耦特性的细菌觅食优化PID控制。使用具有多个初始条件的各种工作场景来测试系统的鲁棒性和性能。仿真结果表明,与PID控制方案相比,细菌觅食优化PID控制方法在提高系统性能方面是有效的。