Yao Lianbi, Wu Hangbin, Li Yayun, Meng Bin, Qian Jinfei, Liu Chun, Fan Hongchao
College of Surveying and Geoinformatics, Tongji University, Shanghai 200092, China.
Institute of Geography, Heidelberg University, Heidelberg D-69120, Germany.
Sensors (Basel). 2017 Apr 11;17(4):837. doi: 10.3390/s17040837.
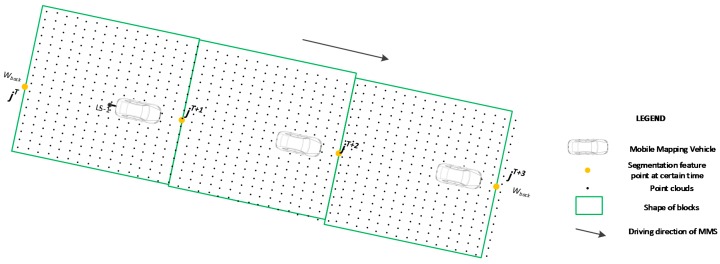
A mobile mapping system (MMS) is usually utilized to collect environmental data on and around urban roads. Laser scanners and panoramic cameras are the main sensors of an MMS. This paper presents a new method for the registration of the point clouds and panoramic images based on sensor constellation. After the sensor constellation was analyzed, a feature point, the intersection of the connecting line between the global positioning system (GPS) antenna and the panoramic camera with a horizontal plane, was utilized to separate the point clouds into blocks. The blocks for the central and sideward laser scanners were extracted with the segmentation feature points. Then, the point clouds located in the blocks were separated from the original point clouds. Each point in the blocks was used to find the accurate corresponding pixel in the relative panoramic images via a collinear function, and the position and orientation relationship amongst different sensors. A search strategy is proposed for the correspondence of laser scanners and lenses of panoramic cameras to reduce calculation complexity and improve efficiency. Four cases of different urban road types were selected to verify the efficiency and accuracy of the proposed method. Results indicate that most of the point clouds (with an average of 99.7%) were successfully registered with the panoramic images with great efficiency. Geometric evaluation results indicate that horizontal accuracy was approximately 0.10-0.20 m, and vertical accuracy was approximately 0.01-0.02 m for all cases. Finally, the main factors that affect registration accuracy, including time synchronization amongst different sensors, system positioning and vehicle speed, are discussed.
移动测绘系统(MMS)通常用于收集城市道路及其周边的环境数据。激光扫描仪和全景相机是MMS的主要传感器。本文提出了一种基于传感器星座的点云与全景图像配准新方法。在分析传感器星座后,利用一个特征点(全球定位系统(GPS)天线与全景相机之间连接线与水平面的交点)将点云分割成块。利用分割特征点提取中央和侧向激光扫描仪的块。然后,将位于这些块中的点云从原始点云中分离出来。通过共线函数以及不同传感器之间的位置和方向关系,利用块中的每个点在相对的全景图像中找到准确对应的像素。提出了一种用于激光扫描仪与全景相机镜头对应关系的搜索策略,以降低计算复杂度并提高效率。选择了四种不同城市道路类型的案例来验证所提方法的效率和准确性。结果表明,大部分点云(平均99.7%)都能高效地与全景图像成功配准。几何评估结果表明,所有案例的水平精度约为0.10 - 0.20米,垂直精度约为0.01 - 0.02米。最后,讨论了影响配准精度的主要因素,包括不同传感器之间的时间同步、系统定位和车速。