Bowman Ellen Lambert, Liu Lei
School of Optometry, University of Alabama at Birmingham, Birmingham, Alabama, United States of America.
PLoS One. 2017 Apr 26;12(4):e0176534. doi: 10.1371/journal.pone.0176534. eCollection 2017.
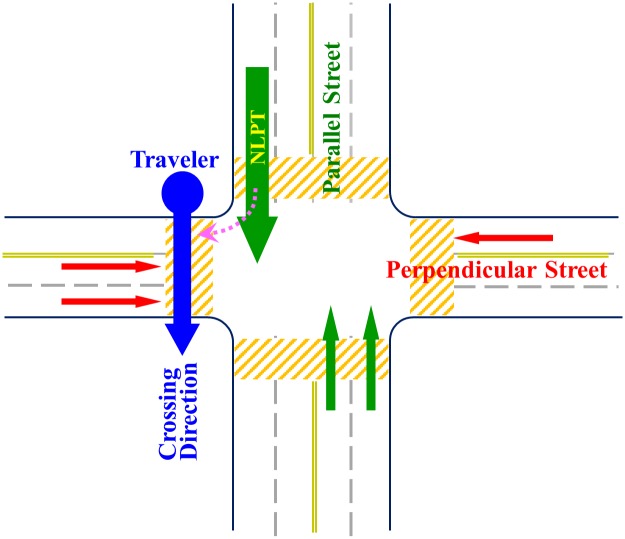
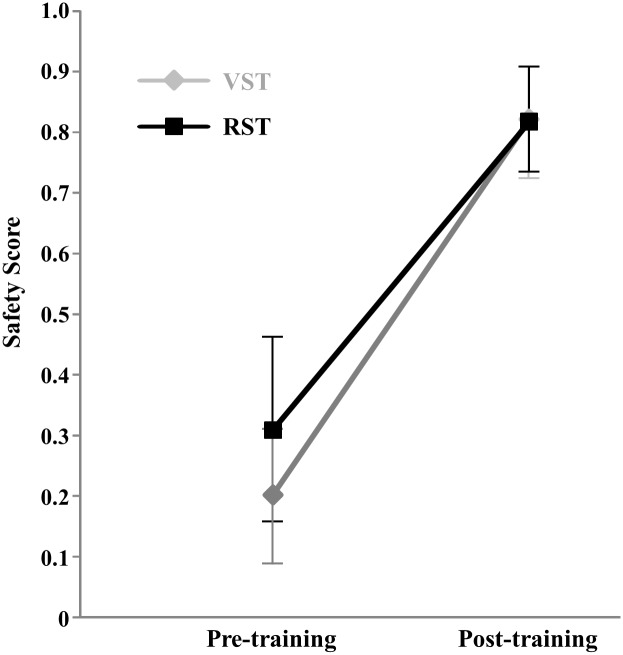
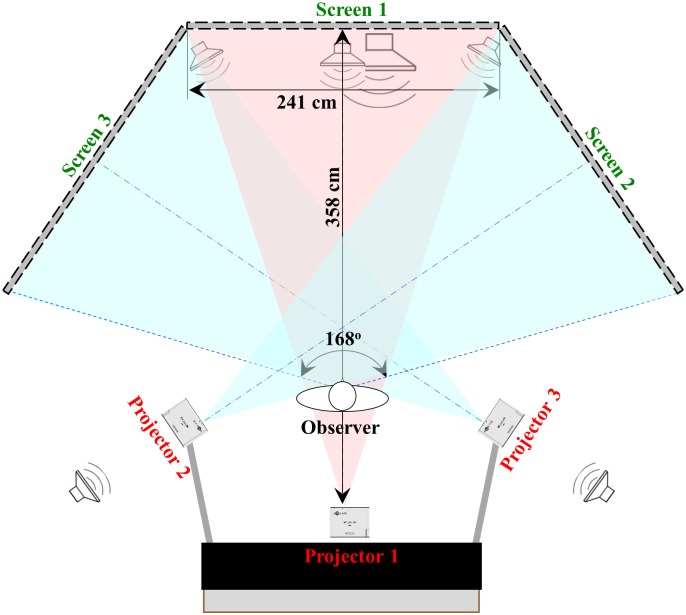
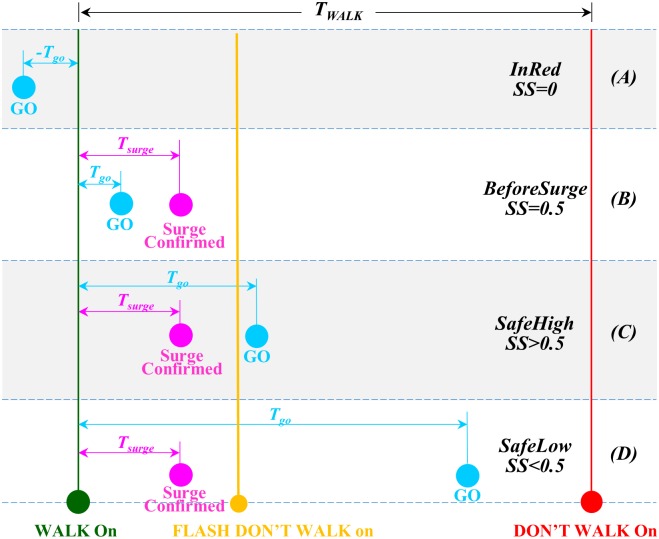
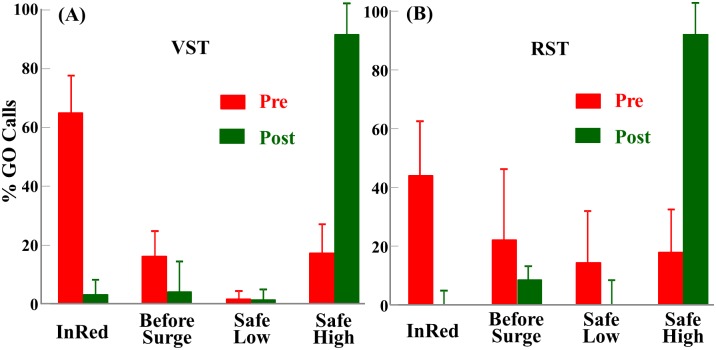
Virtual reality has great potential in training road safety skills to individuals with low vision but the feasibility of such training has not been demonstrated. We tested the hypotheses that low vision individuals could learn useful skills in virtual streets and could apply them to improve real street safety. Twelve participants, whose vision was too poor to use the pedestrian signals were taught by a certified orientation and mobility specialist to determine the safest time to cross the street using the visual and auditory signals made by the start of previously stopped cars at a traffic-light controlled street intersection. Four participants were trained in real streets and eight in virtual streets presented on 3 projection screens. The crossing timing of all participants was evaluated in real streets before and after training. The participants were instructed to say "GO" at the time when they felt the safest to cross the street. A safety score was derived to quantify the GO calls based on its occurrence in the pedestrian phase (when the pedestrian sign did not show DON'T WALK). Before training, > 50% of the GO calls from all participants fell in the DON'T WALK phase of the traffic cycle and thus were totally unsafe. 20% of the GO calls fell in the latter half of the pedestrian phase. These calls were unsafe because one initiated crossing this late might not have sufficient time to walk across the street. After training, 90% of the GO calls fell in the early half of the pedestrian phase. These calls were safer because one initiated crossing in the pedestrian phase and had at least half of the pedestrian phase for walking across. Similar safety changes occurred in both virtual street and real street trained participants. An ANOVA showed a significant increase of the safety scores after training and there was no difference in this safety improvement between the virtual street and real street trained participants. This study demonstrated that virtual reality-based orientation and mobility training could be as efficient as real street training in improving street safety in individuals with severely impaired vision.
虚拟现实在为视力低下者培训道路安全技能方面具有巨大潜力,但此类培训的可行性尚未得到证实。我们检验了以下假设:视力低下者能够在虚拟街道中学习有用的技能,并将其应用于提高实际街道的安全性。12名视力太差而无法使用行人信号灯的参与者,由一名认证的定向与移动专家教导,利用交通灯控制的街道十字路口处先前停下的汽车启动时发出的视觉和听觉信号,来确定过马路的最安全时间。4名参与者在真实街道接受培训,8名在由3个投影屏幕呈现的虚拟街道接受培训。在培训前后,对所有参与者在真实街道中的过马路时机进行评估。参与者被要求在觉得过马路最安全的时候说“走”。根据在行人阶段(当行人信号灯未显示“禁止通行”时)发出的“走”的指令,得出一个安全分数来量化这些指令。培训前,所有参与者超过50%的“走”的指令出现在交通周期的“禁止通行”阶段,因此完全不安全。20%的“走”的指令出现在行人阶段的后半段。这些指令不安全,因为这么晚才开始过马路可能没有足够时间穿过街道。培训后,90%的“走”的指令出现在行人阶段的前半段。这些指令更安全,因为是在行人阶段开始过马路,并且至少有一半的行人阶段时间用于穿过街道。在虚拟街道和真实街道接受培训的参与者都出现了类似的安全变化。方差分析显示培训后安全分数显著提高,并且在虚拟街道和真实街道接受培训的参与者在安全改善方面没有差异。这项研究表明,基于虚拟现实的定向与移动培训在改善视力严重受损者的街道安全方面可以和真实街道培训一样有效。