Goldschmidt Dennis, Manoonpong Poramate, Dasgupta Sakyasingha
Bernstein Center for Computational Neuroscience, Third Institute of Physics - Biophysics, Georg-August UniversityGöttingen, Germany.
Champalimaud Neuroscience Programme, Champalimaud Centre for the UnknownLisbon, Portugal.
Front Neurorobot. 2017 Apr 12;11:20. doi: 10.3389/fnbot.2017.00020. eCollection 2017.
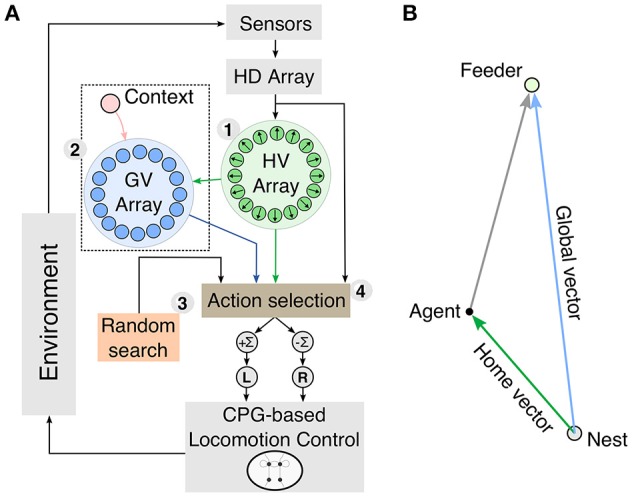
Despite their small size, insect brains are able to produce robust and efficient navigation in complex environments. Specifically in social insects, such as ants and bees, these navigational capabilities are guided by orientation directing vectors generated by a process called path integration. During this process, they integrate compass and odometric cues to estimate their current location as a vector, called the home vector for guiding them back home on a straight path. They further acquire and retrieve path integration-based vector memories globally to the nest or based on visual landmarks. Although existing computational models reproduced similar behaviors, a neurocomputational model of vector navigation including the acquisition of vector representations has not been described before. Here we present a model of neural mechanisms in a modular closed-loop control-enabling vector navigation in artificial agents. The model consists of a path integration mechanism, reward-modulated global learning, random search, and action selection. The path integration mechanism integrates compass and odometric cues to compute a vectorial representation of the agent's current location as neural activity patterns in circular arrays. A reward-modulated learning rule enables the acquisition of vector memories by associating the local food reward with the path integration state. A motor output is computed based on the combination of vector memories and random exploration. In simulation, we show that the neural mechanisms enable robust homing and localization, even in the presence of external sensory noise. The proposed learning rules lead to goal-directed navigation and route formation performed under realistic conditions. Consequently, we provide a novel approach for vector learning and navigation in a simulated, situated agent linking behavioral observations to their possible underlying neural substrates.
尽管昆虫的大脑体积很小,但它们能够在复杂环境中进行强大而高效的导航。特别是在蚂蚁和蜜蜂等社会性昆虫中,这些导航能力由一种称为路径积分的过程所产生的定向引导向量来指导。在这个过程中,它们整合罗盘和里程计线索,将当前位置估计为一个向量,即所谓的归巢向量,用于引导它们沿直线回家。它们还能在全局范围内获取和检索基于路径积分的向量记忆,以返回巢穴或基于视觉地标。虽然现有的计算模型再现了类似的行为,但之前尚未描述过包括向量表征获取在内的向量导航神经计算模型。在这里,我们提出了一种在模块化闭环控制中实现人工智能体向量导航的神经机制模型。该模型由路径积分机制、奖励调制的全局学习、随机搜索和动作选择组成。路径积分机制整合罗盘和里程计线索,将智能体当前位置的向量表示计算为圆形阵列中的神经活动模式。奖励调制学习规则通过将局部食物奖励与路径积分状态相关联,实现向量记忆的获取。基于向量记忆和随机探索的组合来计算运动输出。在模拟中,我们表明即使存在外部感官噪声,这种神经机制也能实现强大的归巢和定位。所提出的学习规则导致在现实条件下进行目标导向的导航和路线形成。因此,我们为模拟情境中的智能体提供了一种将行为观察与其潜在神经基础联系起来的向量学习和导航新方法。