Yang Deng, You Zheng, Li Bin, Duan Wenrui, Yuan Binwen
Department of Precision Instrument, Tsinghua University, Beijing 100084, China.
State Key Laboratory of Precision Measurement Technology and Instruments, Tsinghua University, Beijing 100084, China.
Sensors (Basel). 2017 May 26;17(6):1223. doi: 10.3390/s17061223.
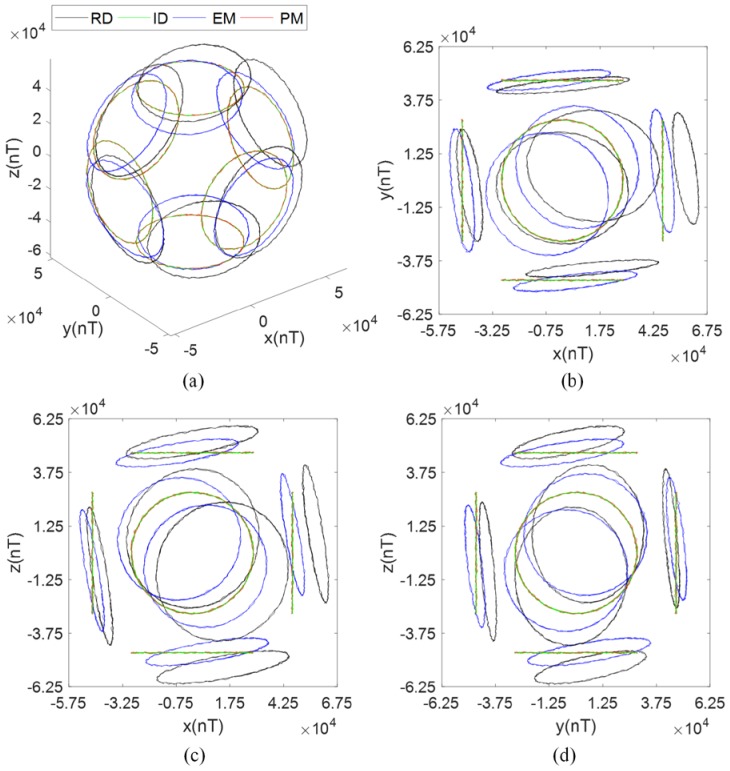
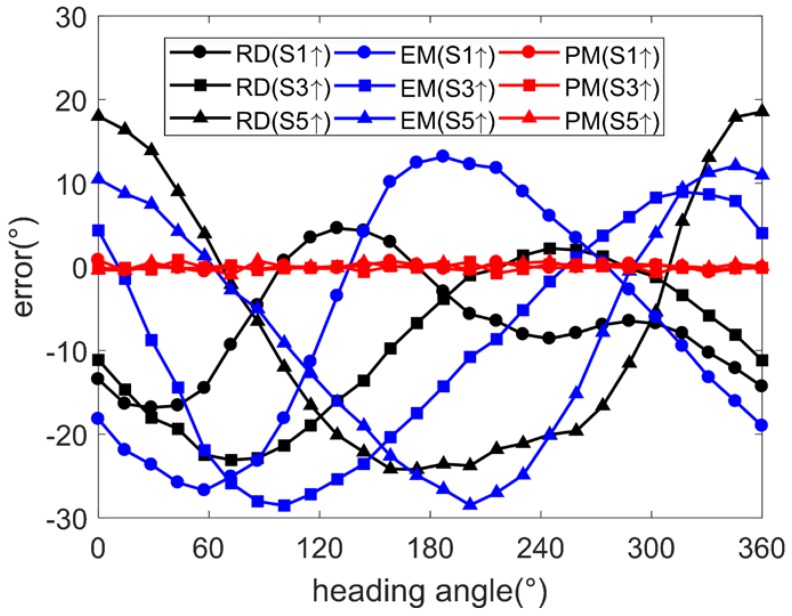
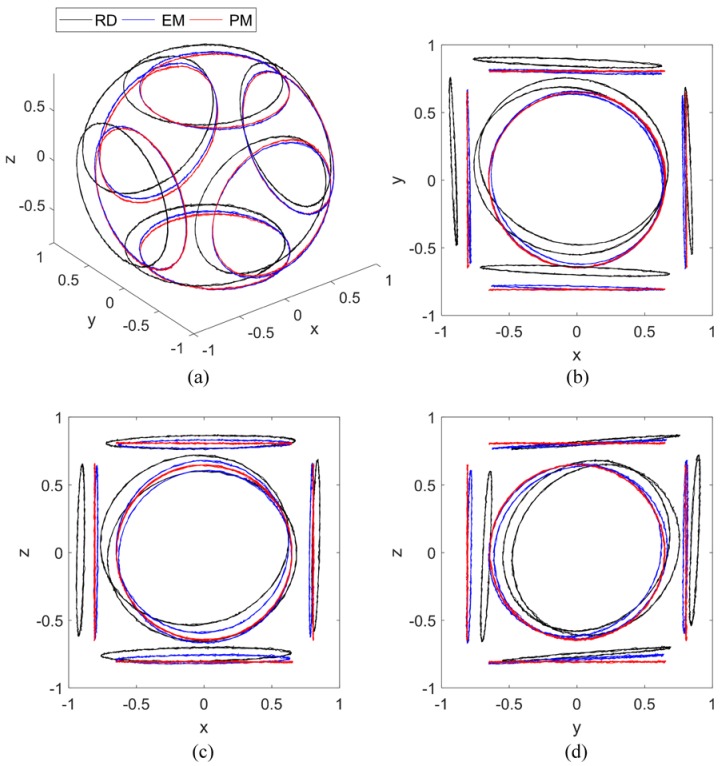
Magnetometers combined with inertial sensors are widely used for orientation estimation, and calibrations are necessary to achieve high accuracy. This paper presents a complete tri-axis magnetometer calibration algorithm with a gyro auxiliary. The magnetic distortions and sensor errors, including the misalignment error between the magnetometer and assembled platform, are compensated after calibration. With the gyro auxiliary, the magnetometer linear interpolation outputs are calculated, and the error parameters are evaluated under linear operations of magnetometer interpolation outputs. The simulation and experiment are performed to illustrate the efficiency of the algorithm. After calibration, the heading errors calculated by magnetometers are reduced to 0.5° (1σ). This calibration algorithm can also be applied to tri-axis accelerometers whose error model is similar to tri-axis magnetometers.
磁力计与惯性传感器相结合被广泛用于方向估计,而校准对于实现高精度是必要的。本文提出了一种带有陀螺仪辅助的完整三轴磁力计校准算法。在校准后,包括磁力计与装配平台之间的失准误差在内的磁畸变和传感器误差得到补偿。借助陀螺仪辅助,计算磁力计线性插值输出,并在磁力计插值输出的线性运算下评估误差参数。进行了仿真和实验以说明该算法的有效性。校准后,由磁力计计算出的航向误差降低到0.5°(1σ)。这种校准算法也可应用于误差模型与三轴磁力计相似的三轴加速度计。