Kim Il-Hwan, Bong Jae-Hwan, Park Jooyoung, Park Shinsuk
Hyundai Motor Company, Hwaseong-si 18280, Korea.
Department of Mechanical Engineering, Korea University, Seoul 02841, Korea.
Sensors (Basel). 2017 Jun 10;17(6):1350. doi: 10.3390/s17061350.
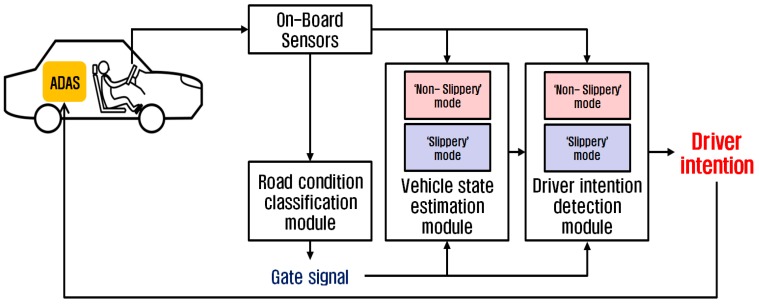
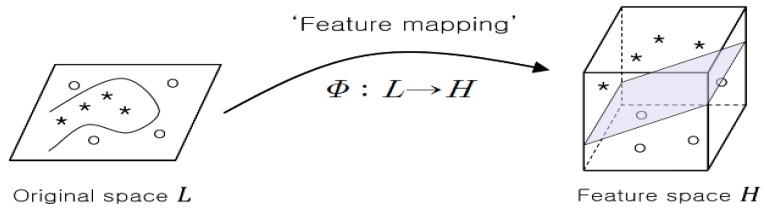
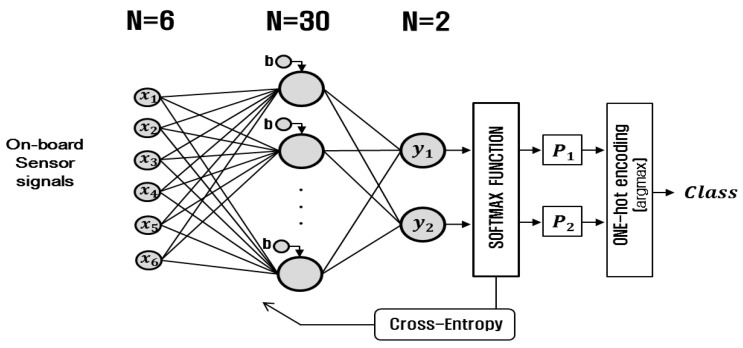
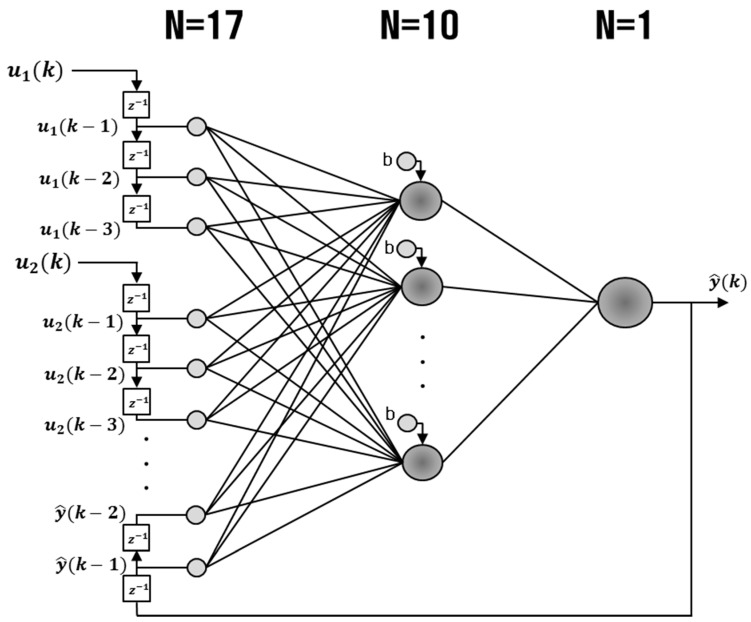
Driver assistance systems have become a major safety feature of modern passenger vehicles. The advanced driver assistance system (ADAS) is one of the active safety systems to improve the vehicle control performance and, thus, the safety of the driver and the passengers. To use the ADAS for lane change control, rapid and correct detection of the driver's intention is essential. This study proposes a novel preprocessing algorithm for the ADAS to improve the accuracy in classifying the driver's intention for lane change by augmenting basic measurements from conventional on-board sensors. The information on the vehicle states and the road surface condition is augmented by using an artificial neural network (ANN) models, and the augmented information is fed to a support vector machine (SVM) to detect the driver's intention with high accuracy. The feasibility of the developed algorithm was tested through driving simulator experiments. The results show that the classification accuracy for the driver's intention can be improved by providing an SVM model with sufficient driving information augmented by using ANN models of vehicle dynamics.
驾驶辅助系统已成为现代乘用车的一项主要安全特性。先进驾驶辅助系统(ADAS)是主动安全系统之一,旨在提高车辆控制性能,进而提升驾驶员和乘客的安全性。要将ADAS用于变道控制,快速且准确地检测驾驶员意图至关重要。本研究提出了一种用于ADAS的新型预处理算法,通过增强传统车载传感器的基本测量数据,提高变道时驾驶员意图分类的准确性。利用人工神经网络(ANN)模型增强车辆状态和路面状况信息,并将增强后的信息输入支持向量机(SVM),以高精度检测驾驶员意图。通过驾驶模拟器实验测试了所开发算法的可行性。结果表明,通过为SVM模型提供利用车辆动力学ANN模型增强的足够驾驶信息,可以提高驾驶员意图的分类准确性。