Jiang Qingan, Wu Wenqi, Jiang Mingming, Li Yun
Department of Automatic Control, College of Mechatronics and Automation, National University of Defense Technology, Changsha 410073, China.
Sensors (Basel). 2017 Jun 19;17(6):1438. doi: 10.3390/s17061438.
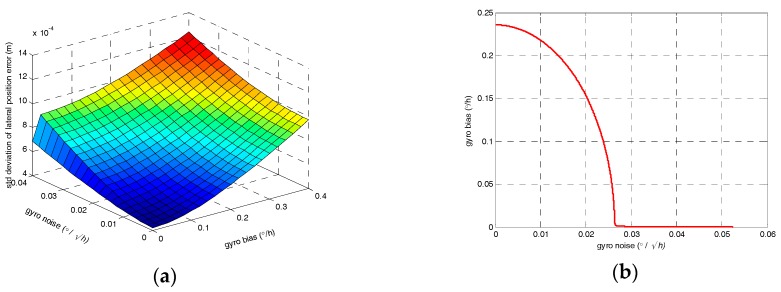
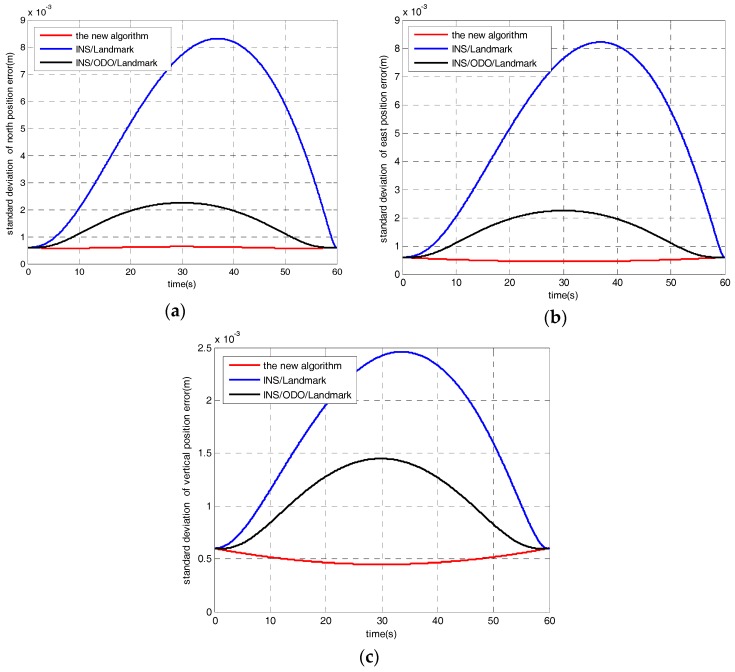
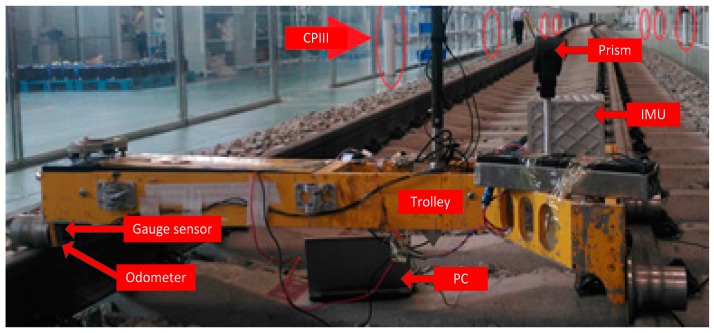
High-accuracy railway track surveying is essential for railway construction and maintenance. The traditional approaches based on total station equipment are not efficient enough since high precision surveying frequently needs static measurements. This paper proposes a new filtering and smoothing algorithm based on the IMU/odometer and landmarks integration for the railway track surveying. In order to overcome the difficulty of estimating too many error parameters with too few landmark observations, a new model with completely observable error states is established by combining error terms of the system. Based on covariance analysis, the analytical relationship between the railway track surveying accuracy requirements and equivalent gyro drifts including bias instability and random walk noise are established. Experiment results show that the accuracy of the new filtering and smoothing algorithm for railway track surveying can reach 1 mm (1σ) when using a Ring Laser Gyroscope (RLG)-based Inertial Measurement Unit (IMU) with gyro bias instability of 0.03°/h and random walk noise of 0.005 °h while control points of the track control network (CPIII) position observations are provided by the optical total station in about every 60 m interval. The proposed approach can satisfy at the same time the demands of high accuracy and work efficiency for railway track surveying.
高精度铁路轨道测量对于铁路建设和维护至关重要。基于全站仪设备的传统方法效率不够高,因为高精度测量经常需要静态测量。本文提出了一种基于惯性测量单元(IMU)/里程计和地标融合的铁路轨道测量新滤波和平滑算法。为了克服利用过少地标观测估计过多误差参数的困难,通过组合系统误差项建立了一个具有完全可观测误差状态的新模型。基于协方差分析,建立了铁路轨道测量精度要求与等效陀螺漂移(包括偏置不稳定性和随机游走噪声)之间的解析关系。实验结果表明,当使用基于环形激光陀螺仪(RLG)的惯性测量单元(IMU),其陀螺偏置不稳定性为0.03°/小时,随机游走噪声为0.005°/√小时,且轨道控制网(CPIII)控制点位置观测由光学全站仪每隔约60米间隔提供时,新的铁路轨道测量滤波和平滑算法的精度可达1毫米(1σ)。所提出的方法能够同时满足铁路轨道测量高精度和工作效率的要求。