Minea Marius, Dumitrescu Cătălin Marian, Dima Mihai
Department Telematics and Electronics for Transports, University Politehnica of Bucharest, 060042 Bucharest, Romania.
Sensors (Basel). 2021 Oct 16;21(20):6876. doi: 10.3390/s21206876.
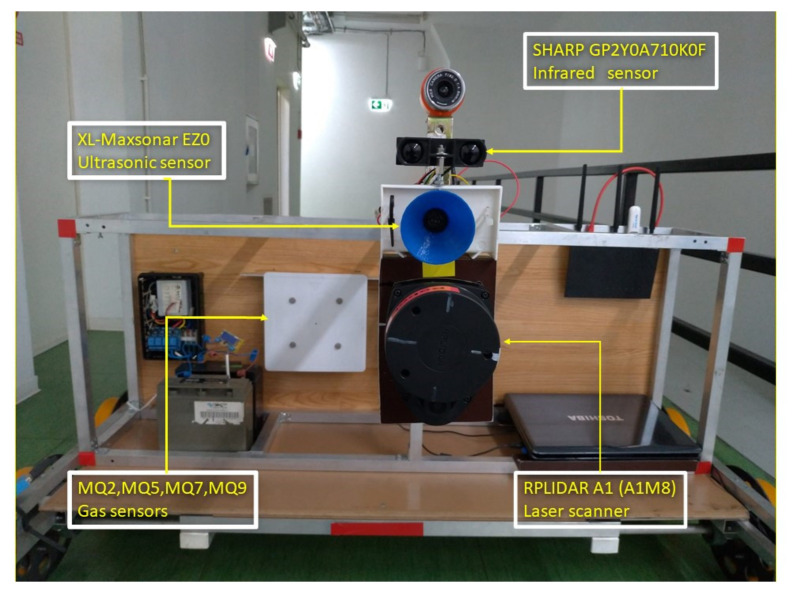
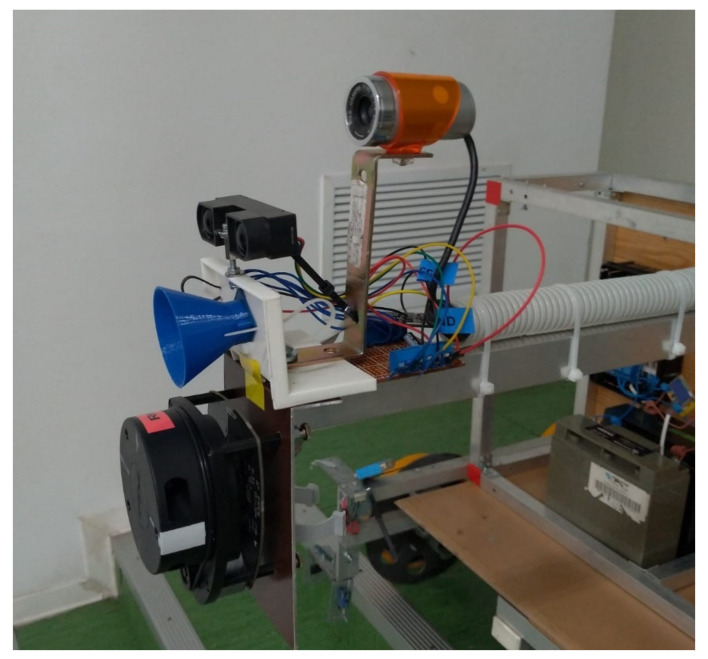
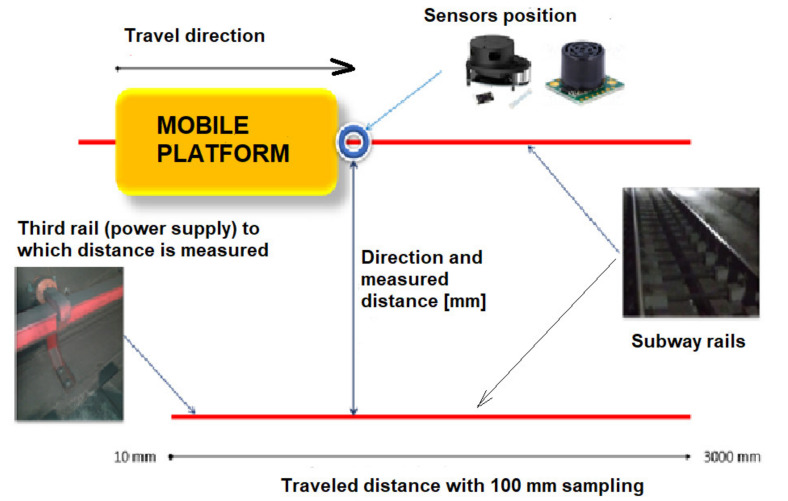
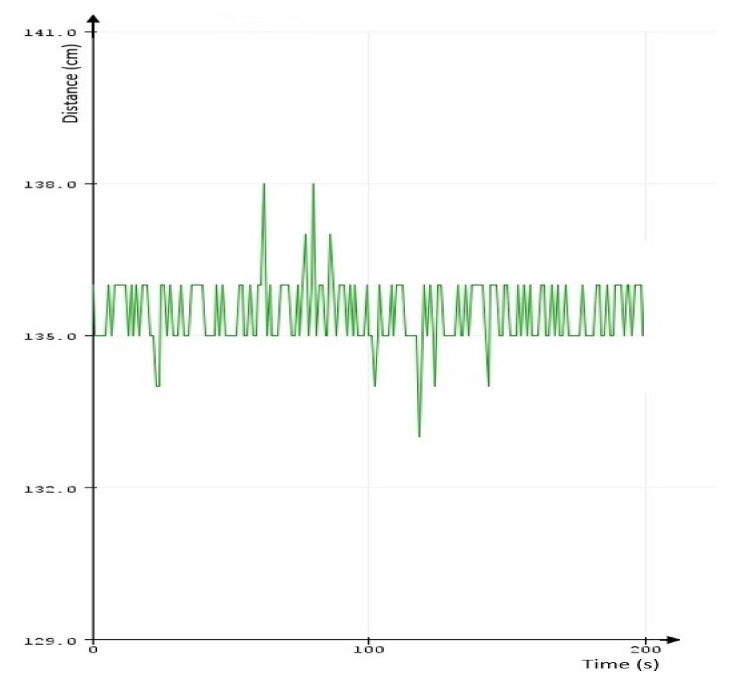
This article presents the research and results of field tests and simulations regarding an autonomous/robotic railway vehicle, designed to collect multiple information on safety and functional parameters of a surface railway and/or subway section, based on data fusion and machine learning. The maintenance of complex railways, or subway networks with long operating times is a difficult process and intensive resources consuming. The proposed solution delivers human operators in the fault management service and operations from the time-consuming task of railway inspection and measurements, by integrating several sensors and collecting most relevant information on railway, associated automation equipment and infrastructure on a single intelligent platform. The robotic cart integrates autonomy, remote sensing, artificial intelligence, and ability to detect even infrastructural anomalies. Moreover, via a future process of complex statistical filtering of data, it is foreseen that the solution might be configured to offer second-order information about infrastructure changes, such as land sliding, water flooding, or similar modifications. Results of simulations and field tests show the ability of the platform to integrate several fault management operations in a single process, useful in increasing railway capacity and resilience.
本文介绍了关于一种自主/机器人铁路车辆的现场测试和模拟研究及结果,该车辆旨在基于数据融合和机器学习收集地面铁路和/或地铁区段安全及功能参数的多种信息。维护复杂的铁路或运营时间长的地铁网络是一个困难且资源消耗大的过程。所提出的解决方案通过在单个智能平台上集成多个传感器并收集有关铁路、相关自动化设备和基础设施的最相关信息,将人类操作员从铁路检查和测量这一耗时的任务中解放出来,使其能够从事故障管理服务和运营工作。机器人推车集成了自主性、遥感、人工智能以及检测甚至基础设施异常的能力。此外,通过未来对数据进行复杂统计滤波的过程,预计该解决方案可能被配置为提供有关基础设施变化的二阶信息,例如山体滑坡、洪水或类似变化。模拟和现场测试结果表明,该平台能够在单个过程中集成多种故障管理操作,这有助于提高铁路运力和恢复能力。