Gerboni Giada, Greer Joseph D, Laeseke Paul F, Hwang Gloria L, Okamura Allison M
Mechanical Engineering Department, Stanford University, Stanford, CA 94035 USA.
Radiology Department, University of Wisconsin, Madison, WI 53715 USA.
IEEE Robot Autom Lett. 2017 Jul;2(3):1367-1374. doi: 10.1109/LRA.2017.2668467. Epub 2017 Feb 14.
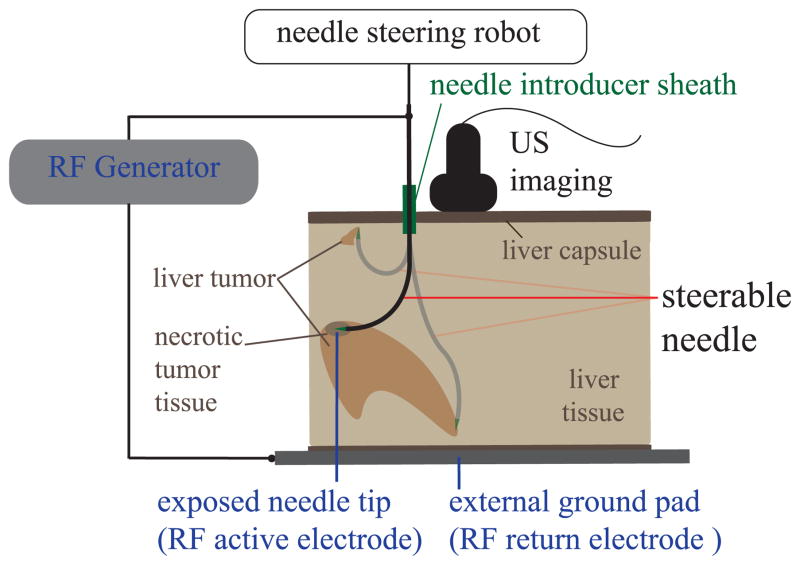
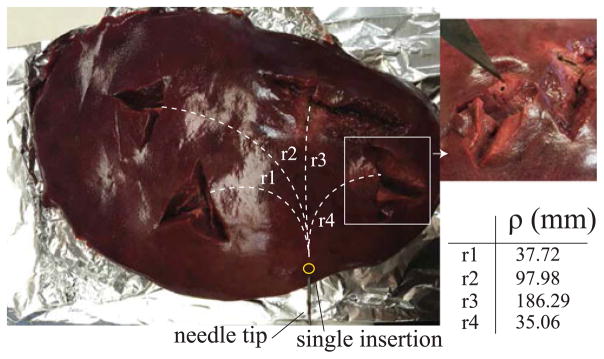
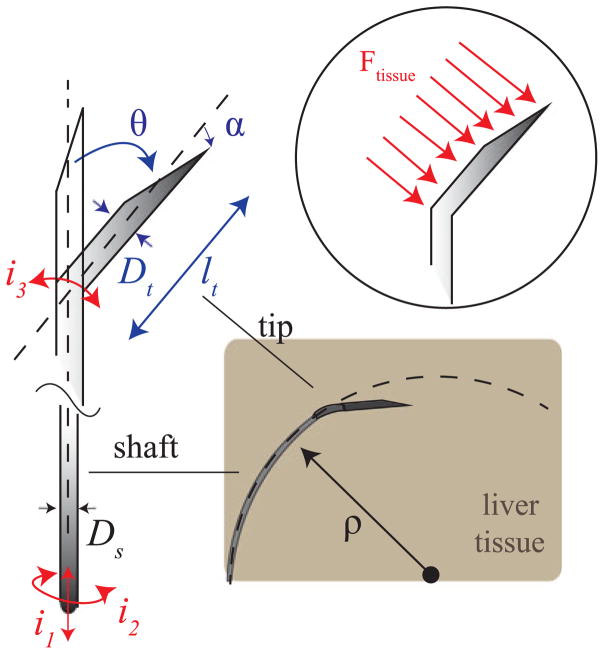
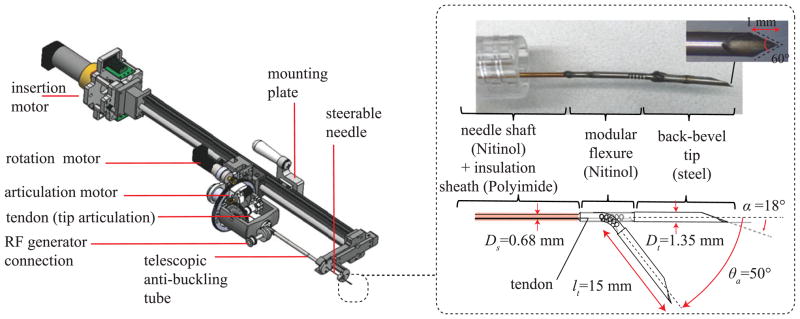
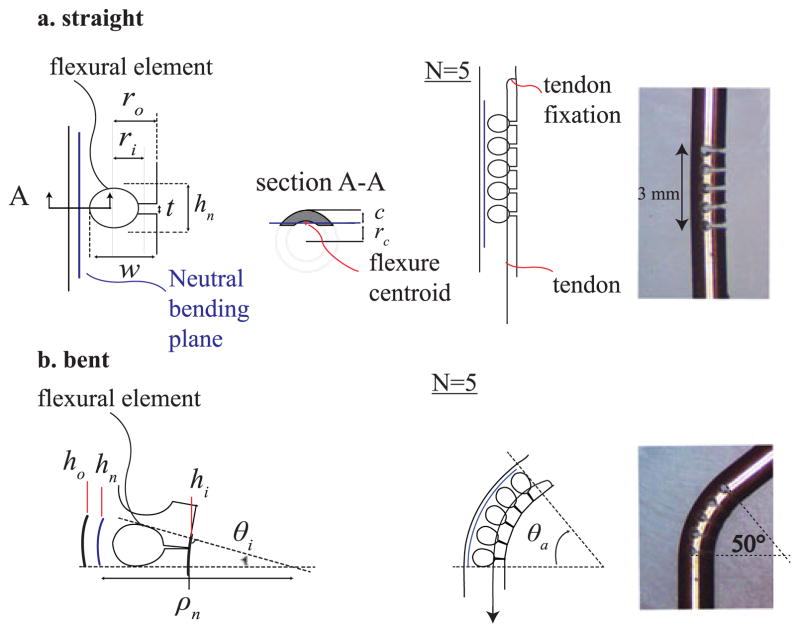
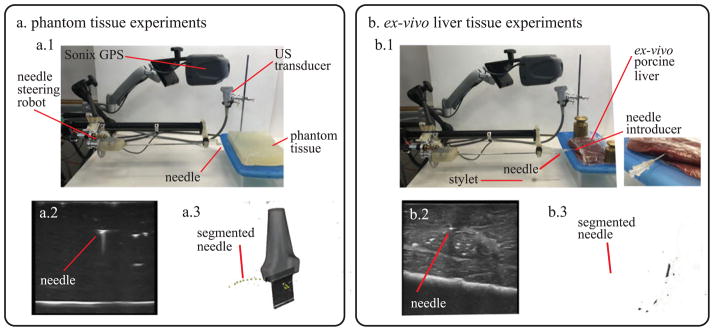
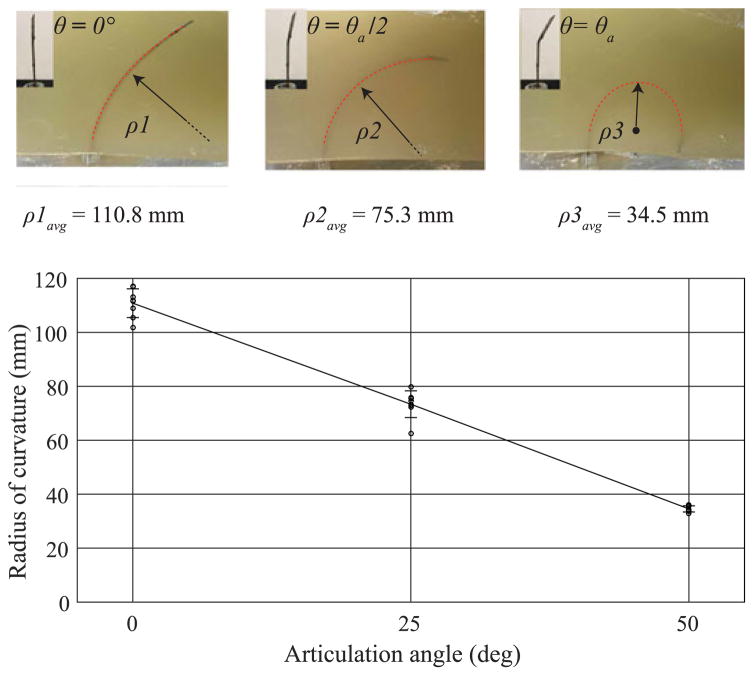
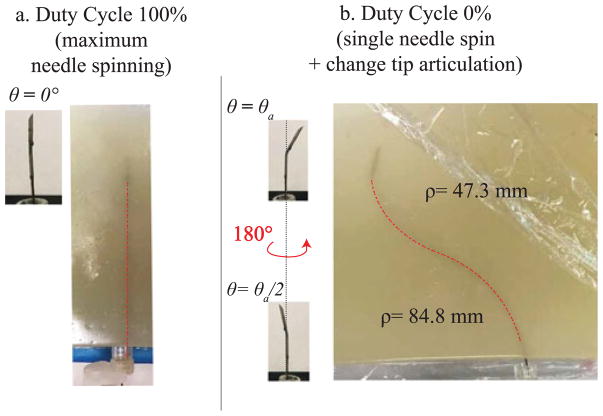
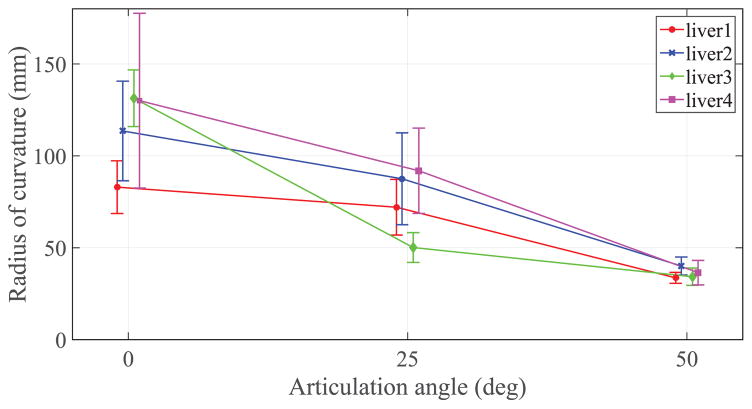
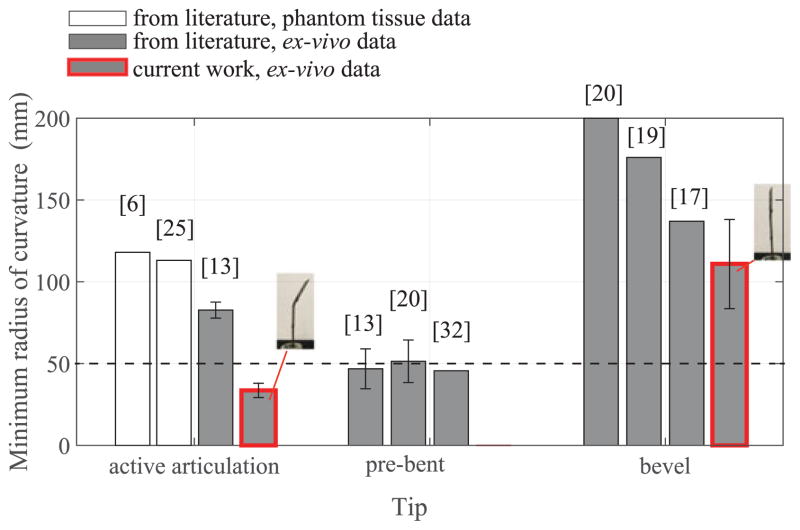
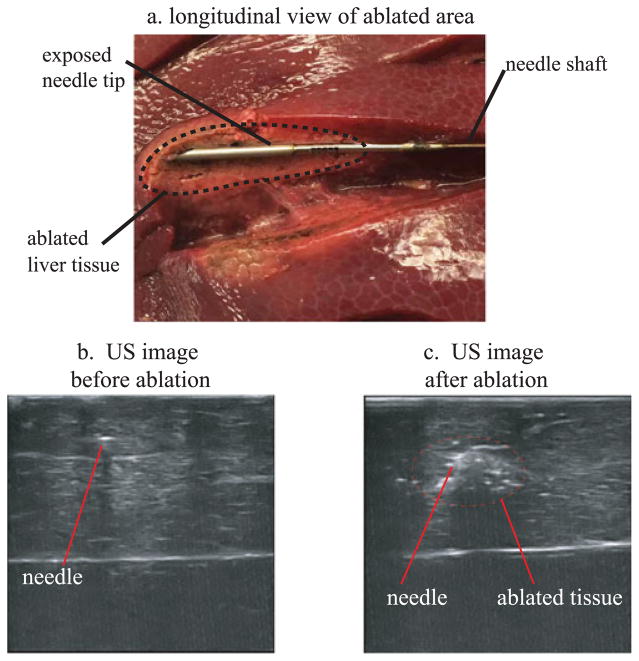
Robotic needle steering will improve percutaneous radio-frequency ablation (RFA) in the liver by performing distributed ablations without requiring multiple punctures of the liver capsule, thus enabling the treatment of large or multifocal tumors. However, state-of-the-art asymmetric-tip robotic needle steering systems do not yet achieve clinically relevant curvature. This work presents the design and development of a highly articulated needle that enables distributed RFA in liver tissue under ultrasound (US) image guidance. Our new needle design attains the target curvature required for liver procedures while meeting important clinical requirements, such as the use of fixed diameter needle introducers, presence of a free needle working channel, robustness for repeated insertions, and conductivity for the delivery of RF current for tissue ablation. The new needle tip includes two important design features: A tendon-actuated Nitinol asymmetric flexure joint, which allows for an active amplification of the needle steering force, and a steel back-bevel tip profile, which decreases the risk of needle jamming. The needle's resulting curvature was evaluated in both phantom and liver tissues using segmented US images. The average radius of minimum curvature in liver tissue was found to be 33.6 mm, the smallest reported to date. Furthermore, RFA in porcine liver tissue tests were performed to demonstrate that distributedablation with a single puncture of the liver capsule is possible via robotic needle steering.
机器人针转向技术将通过进行分布式消融来改进肝脏的经皮射频消融(RFA),而无需多次穿刺肝包膜,从而能够治疗大型或多灶性肿瘤。然而,最先进的不对称尖端机器人针转向系统尚未实现与临床相关的弯曲度。这项工作展示了一种高度灵活的针的设计与开发,该针能够在超声(US)图像引导下在肝组织中进行分布式RFA。我们的新针设计在满足重要临床要求的同时,达到了肝脏手术所需的目标弯曲度,这些要求包括使用固定直径的针引导器、存在自由的针工作通道、重复插入的稳健性以及用于组织消融的射频电流传输的导电性。新的针尖包括两个重要的设计特征:一个由肌腱驱动的镍钛诺不对称挠曲关节,它允许主动放大针转向力;以及一个钢质后斜角针尖轮廓,它降低了针堵塞的风险。使用分段的超声图像在模拟组织和肝组织中评估了针产生的弯曲度。在肝组织中测得的最小曲率平均半径为33.6毫米,这是迄今为止报道的最小值。此外,在猪肝组织测试中进行了RFA,以证明通过机器人针转向,单次穿刺肝包膜进行分布式消融是可行的。