Adebar Troy K, Fletcher Ashley E, Okamura Allison M
IEEE Trans Biomed Eng. 2014 Dec;61(12):2899-910. doi: 10.1109/TBME.2014.2334309. Epub 2014 Jul 1.
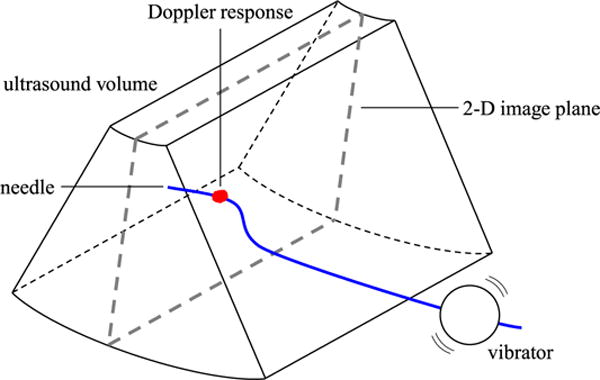
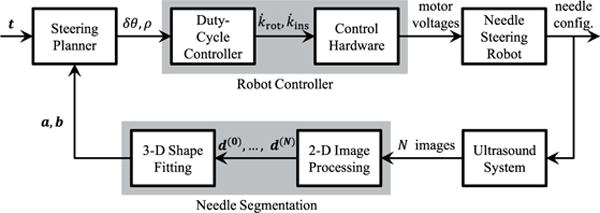
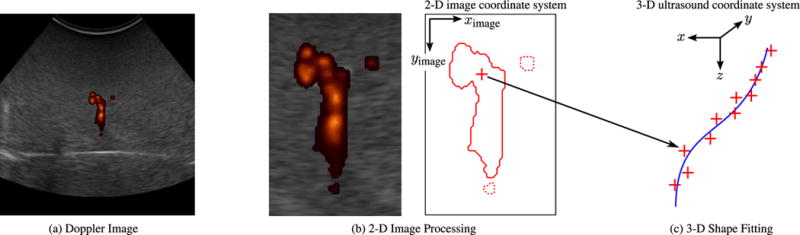
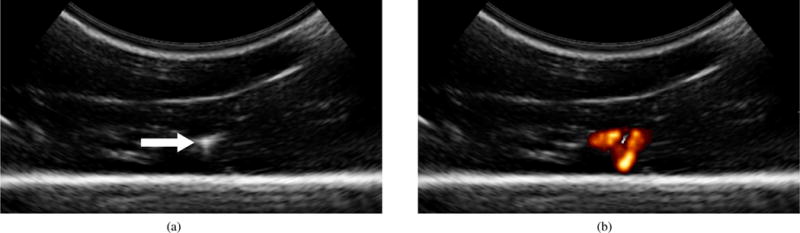
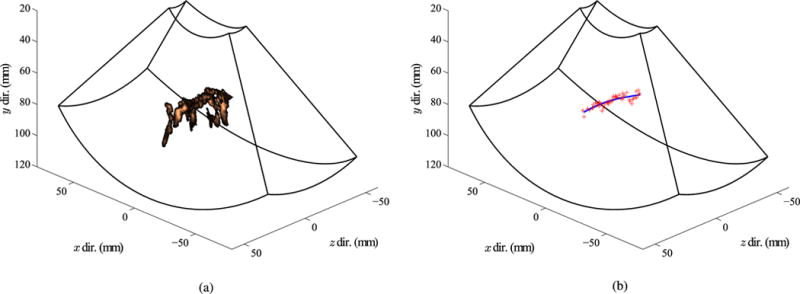
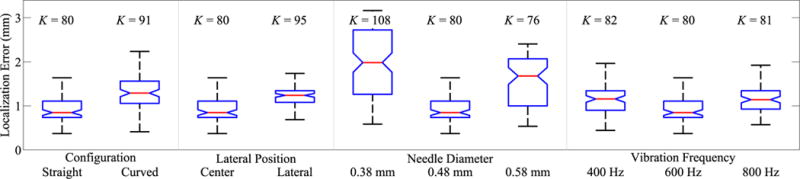
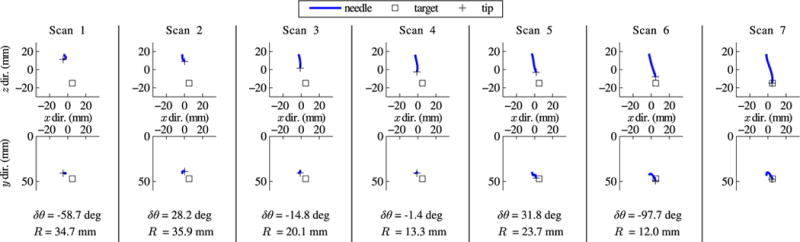
Robotic needle steering systems have the potential to greatly improve medical interventions, but they require new methods for medical image guidance. Three-dimensional (3-D) ultrasound is a widely available, low-cost imaging modality that may be used to provide real-time feedback to needle steering robots. Unfortunately, the poor visibility of steerable needles in standard grayscale ultrasound makes automatic segmentation of the needles impractical. A new imaging approach is proposed, in which high-frequency vibration of a steerable needle makes it visible in ultrasound Doppler images. Experiments demonstrate that segmentation from this Doppler data is accurate to within 1-2 mm. An image-guided control algorithm that incorporates the segmentation data as feedback is also described. In experimental tests in ex vivo bovine liver tissue, a robotic needle steering system implementing this control scheme was able to consistently steer a needle tip to a simulated target with an average error of 1.57 mm. Implementation of 3-D ultrasound-guided needle steering in biological tissue represents a significant step toward the clinical application of robotic needle steering.
机器人针转向系统有潜力极大地改善医疗干预,但它们需要用于医学图像引导的新方法。三维(3-D)超声是一种广泛可用、低成本的成像方式,可用于向针转向机器人提供实时反馈。不幸的是,在标准灰度超声中可转向针的可视性较差,使得对针进行自动分割不切实际。本文提出了一种新的成像方法,其中可转向针的高频振动使其在超声多普勒图像中可见。实验表明,从该多普勒数据进行的分割精度在1-2毫米以内。还描述了一种将分割数据作为反馈的图像引导控制算法。在体外牛肝组织的实验测试中,实施该控制方案的机器人针转向系统能够始终将针尖引导至模拟目标,平均误差为1.57毫米。在生物组织中实施三维超声引导的针转向代表了机器人针转向临床应用的重要一步。