Lanini Jessica, Duburcq Alexis, Razavi Hamed, Le Goff Camille G, Ijspeert Auke Jan
Ecole Polytechnique Fédérale de Lausanne, Lausanne CH-1015, Switzerland.
PLoS One. 2017 Sep 6;12(9):e0179989. doi: 10.1371/journal.pone.0179989. eCollection 2017.
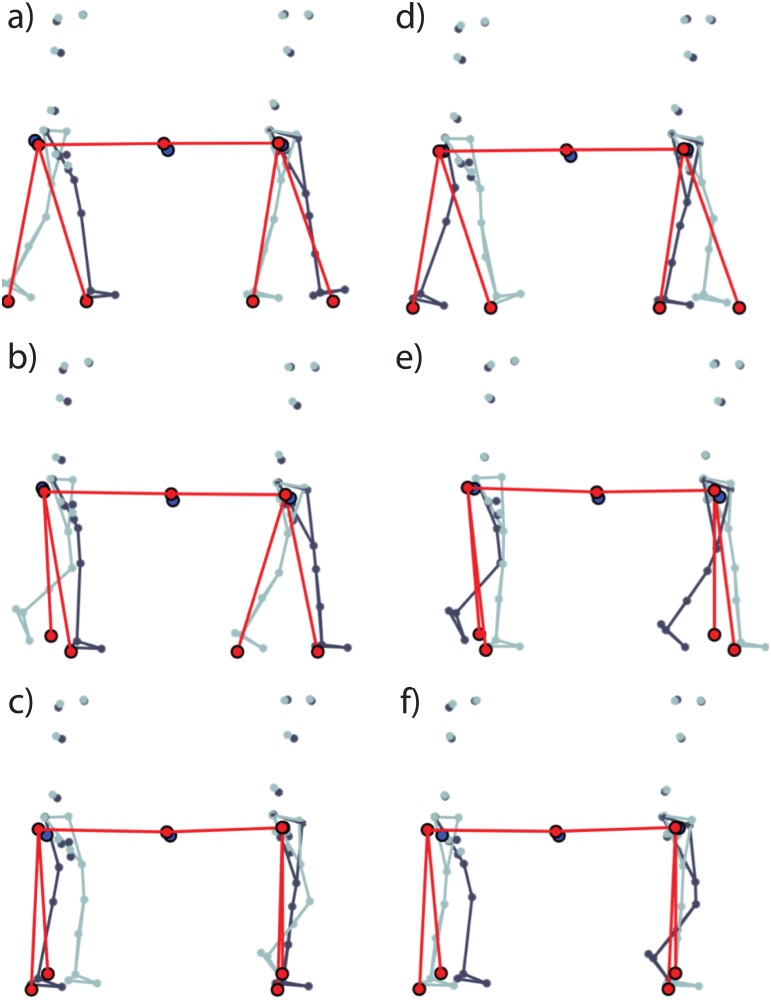
In spite of extensive studies on human walking, less research has been conducted on human walking gait adaptation during interaction with another human. In this paper, we study a particular case of interactive locomotion where two humans carry a rigid object together. Experimental data from two persons walking together, one in front of the other, while carrying a stretcher-like object is presented, and the adaptation of their walking gaits and coordination of the foot-fall patterns are analyzed. It is observed that in more than 70% of the experiments the subjects synchronize their walking gaits; it is shown that these walking gaits can be associated to quadrupedal gaits. Moreover, in order to understand the extent by which the passive dynamics can explain this synchronization behaviour, a simple 2D model, made of two-coupled spring-loaded inverted pendulums, is developed, and a comparison between the experiments and simulations with this model is presented, showing that with this simple model we are able to reproduce some aspects of human walking behaviour when paired with another human.
尽管对人类行走已进行了广泛研究,但针对人类在与他人互动过程中的行走步态适应性的研究却较少。在本文中,我们研究了一种特殊的互动式运动情况,即两个人共同搬运一个刚性物体。文中给出了两人一前一后共同搬运类似担架物体时的实验数据,并分析了他们行走步态的适应性以及脚步落地模式的协调性。观察发现,在超过70%的实验中,受试者会使他们的行走步态同步;研究表明这些行走步态可与四足动物的步态相关联。此外,为了理解被动动力学能够解释这种同步行为的程度,我们开发了一个由两个耦合的弹簧加载倒立摆组成的简单二维模型,并给出了该模型的实验与模拟结果的对比,结果表明使用这个简单模型我们能够重现人类与他人配对行走时的一些行为特征。