Qiao Yongliang
Le2i FRE2005, CNRS, Arts et Métiers, UBFC, Université de technologie de Belfort-Montbéliard, Belfort 90000, France.
Sensors (Basel). 2017 Oct 25;17(11):2442. doi: 10.3390/s17112442.
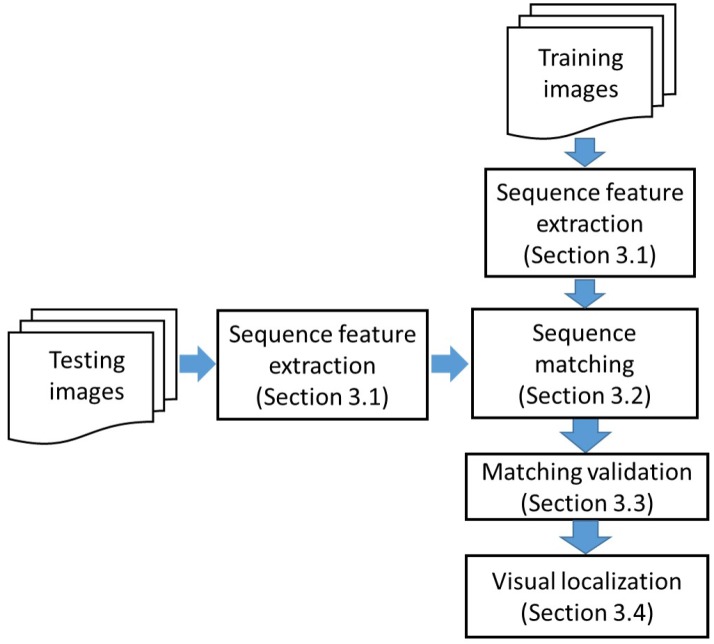
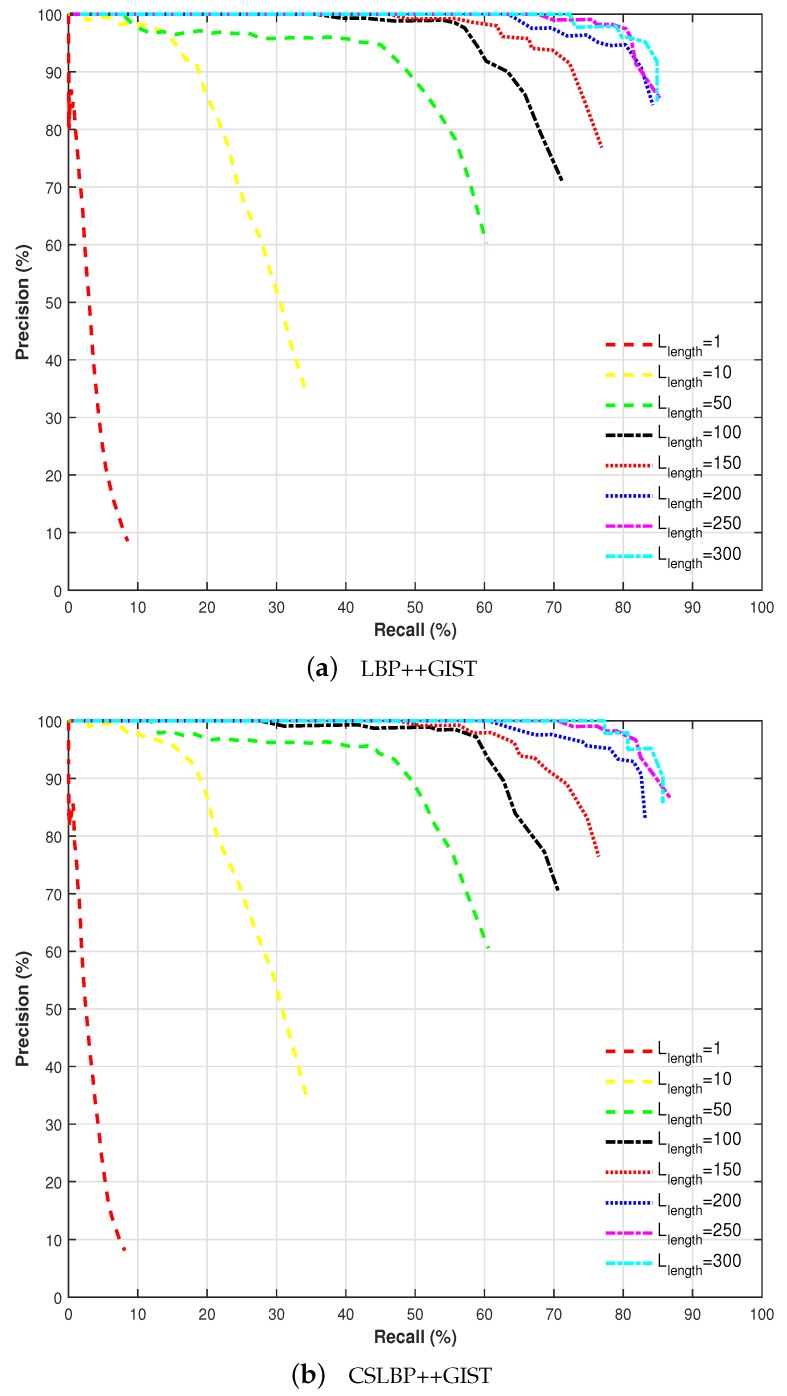
Visual localization is widely used in autonomous navigation system and Advanced Driver Assistance Systems (ADAS). However, visual-based localization in seasonal changing situations is one of the most challenging topics in computer vision and the intelligent vehicle community. The difficulty of this task is related to the strong appearance changes that occur in scenes due to weather or season changes. In this paper, a place recognition based visual localization method is proposed, which realizes the localization by identifying previously visited places using the sequence matching method. It operates by matching query image sequences to an image database acquired previously (video acquired during traveling period). In this method, in order to improve matching accuracy, multi-feature is constructed by combining a global GIST descriptor and local binary feature CSLBP (Center-symmetric local binary patterns) to represent image sequence. Then, similarity measurement according to Chi-square distance is used for effective sequences matching. For experimental evaluation, the relationship between image sequence length and sequences matching performance is studied. To show its effectiveness, the proposed method is tested and evaluated in four seasons outdoor environments. The results have shown improved precision-recall performance against the state-of-the-art SeqSLAM algorithm.
视觉定位在自主导航系统和高级驾驶辅助系统(ADAS)中得到了广泛应用。然而,在季节变化情况下基于视觉的定位是计算机视觉和智能车辆领域中最具挑战性的课题之一。这项任务的难点在于由于天气或季节变化,场景中会出现强烈的外观变化。本文提出了一种基于地点识别的视觉定位方法,该方法通过使用序列匹配方法识别先前访问过的地点来实现定位。它通过将查询图像序列与先前获取的图像数据库(行驶期间获取的视频)进行匹配来运行。在该方法中,为了提高匹配精度,通过结合全局GIST描述符和局部二值特征CSLBP(中心对称局部二值模式)来构建多特征以表示图像序列。然后,使用基于卡方距离的相似性度量进行有效的序列匹配。为了进行实验评估,研究了图像序列长度与序列匹配性能之间的关系。为了证明其有效性,在四季户外环境中对所提出的方法进行了测试和评估。结果表明,相对于最先进的SeqSLAM算法,该方法的精确率-召回率性能有所提高。