Mousas Christos
Department of Computer Science, Southern Illinois University, 1230 Lincoln Drive, Mail Code 4511, Carbondale, IL 62901, USA.
Sensors (Basel). 2017 Nov 10;17(11):2589. doi: 10.3390/s17112589.
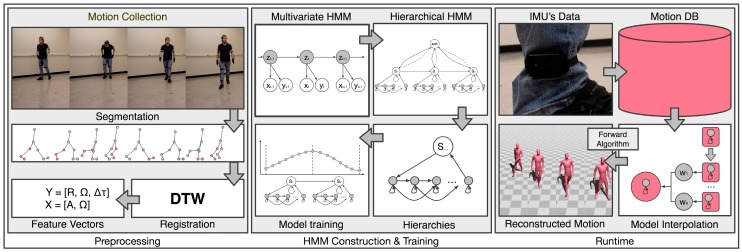
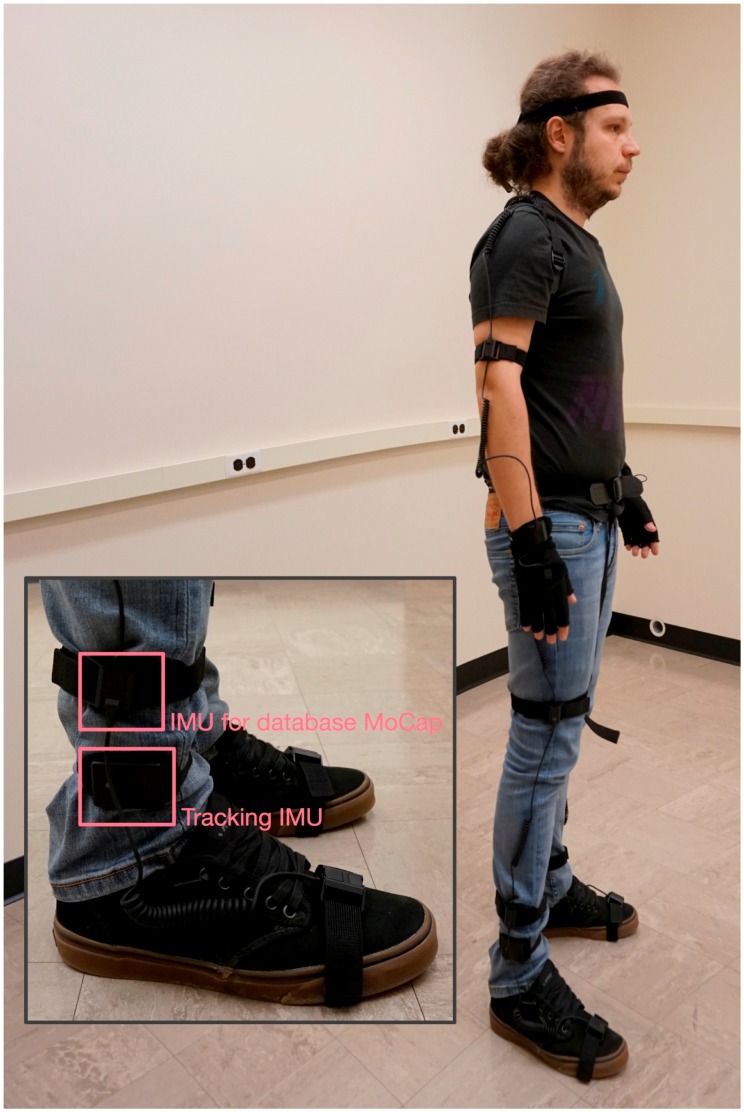
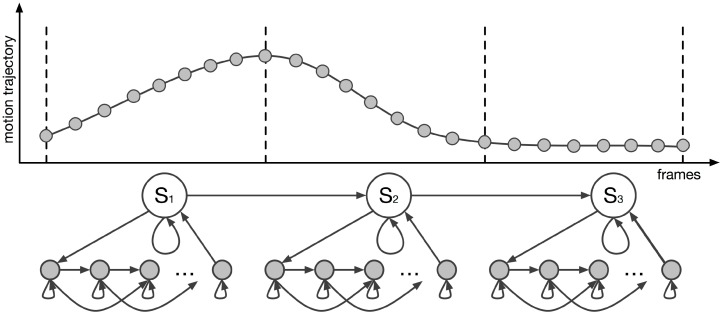
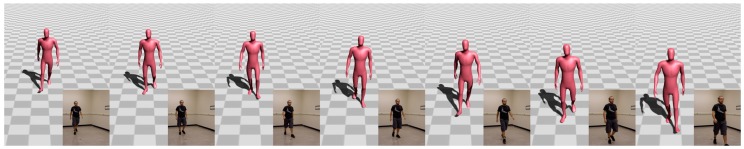
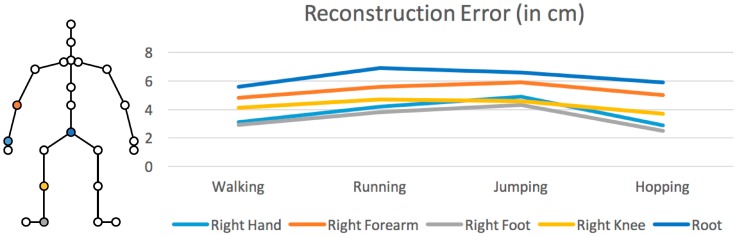
This paper presents a method of reconstructing full-body locomotion sequences for virtual characters in real-time, using data from a single inertial measurement unit (IMU). This process can be characterized by its difficulty because of the need to reconstruct a high number of degrees of freedom (DOFs) from a very low number of DOFs. To solve such a complex problem, the presented method is divided into several steps. The user's full-body locomotion and the IMU's data are recorded simultaneously. Then, the data is preprocessed in such a way that would be handled more efficiently. By developing a hierarchical multivariate hidden Markov model with reactive interpolation functionality the system learns the structure of the motion sequences. Specifically, the phases of the locomotion sequence are assigned in the higher hierarchical level, and the frame structure of the motion sequences are assigned at the lower hierarchical level. During the runtime of the method, the forward algorithm is used for reconstructing the full-body motion of a virtual character. Firstly, the method predicts the phase where the input motion belongs (higher hierarchical level). Secondly, the method predicts the closest trajectories and their progression and interpolates the most probable of them to reconstruct the virtual character's full-body motion (lower hierarchical level). Evaluating the proposed method shows that it works on reasonable framerates and minimizes the reconstruction errors compared with previous approaches.
本文提出了一种利用来自单个惯性测量单元(IMU)的数据实时重建虚拟角色全身运动序列的方法。由于需要从非常少的自由度重建大量的自由度,这个过程可能会很困难。为了解决这样一个复杂的问题,所提出的方法被分为几个步骤。用户的全身运动和IMU的数据同时被记录下来。然后,对数据进行预处理,使其能被更高效地处理。通过开发具有反应式插值功能的分层多元隐马尔可夫模型,系统学习运动序列的结构。具体来说,运动序列的阶段在较高层次上被分配,运动序列的帧结构在较低层次上被分配。在该方法的运行时,前向算法用于重建虚拟角色的全身运动。首先,该方法预测输入运动所属的阶段(较高层次)。其次,该方法预测最接近的轨迹及其进展,并对其中最可能的轨迹进行插值以重建虚拟角色的全身运动(较低层次)。对所提出方法的评估表明,它能以合理的帧率运行,并且与以前的方法相比,能将重建误差最小化。