Kim Myunghee, Collins Steven H
Experimental Biomechatronics Laboratory, Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA, United States.
Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, United States.
Front Neurorobot. 2017 Nov 14;11:62. doi: 10.3389/fnbot.2017.00062. eCollection 2017.
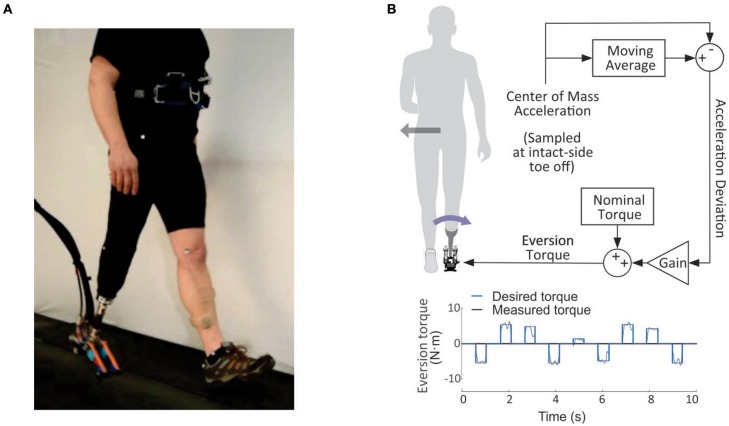
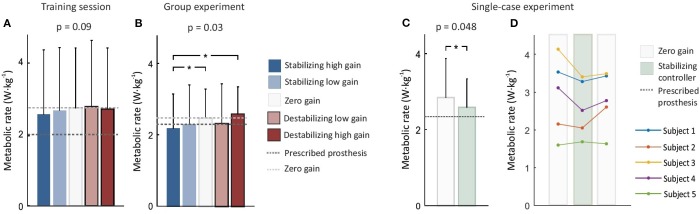
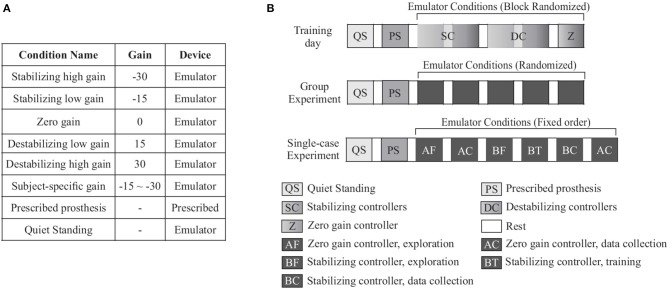
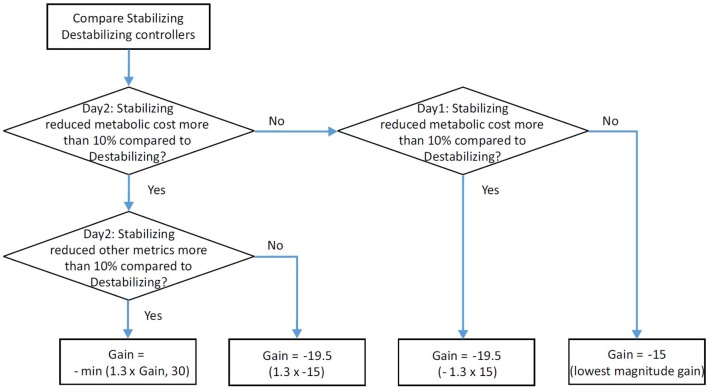
Below-knee amputation is associated with higher energy expenditure during walking, partially due to difficulty maintaining balance. We previously found that once-per-step push-off work control can reduce balance-related effort, both in simulation and in experiments with human participants. Simulations also suggested that changing ankle inversion/eversion torque on each step, in response to changes in body state, could assist with balance. In this study, we investigated the effects of ankle inversion/eversion torque modulation on balance-related effort among amputees ( = 5) using a multi-actuated ankle-foot prosthesis emulator. In stabilizing conditions, changes in ankle inversion/eversion torque were applied so as to counteract deviations in side-to-side center-of-mass acceleration at the moment of intact-limb toe off; higher acceleration toward the prosthetic limb resulted in a corrective ankle inversion torque during the ensuing stance phase. Destabilizing controllers had the opposite effect, and a zero gain controller made no changes to the nominal inversion/eversion torque. To separate the balance-related effects of step-to-step control from the potential effects of changes in average mechanics, average ankle inversion/eversion torque and prosthesis work were held constant across conditions. High-gain stabilizing control lowered metabolic cost by 13% compared to the zero gain controller ( = 0.05). We then investigated individual responses to subject-specific stabilizing controllers following an enforced exploration period. Four of five participants experienced reduced metabolic rate compared to the zero gain controller (-15, -14, -11, -6, and +4%) an average reduction of 9% ( = 0.05). Average prosthesis mechanics were unchanged across all conditions, suggesting that improvements in energy economy might have come from changes in step-to-step corrections related to balance. Step-to-step modulation of inversion/eversion torque could be used in new, active ankle-foot prostheses to reduce walking effort associated with maintaining balance.
膝下截肢与行走时较高的能量消耗相关,部分原因是难以保持平衡。我们之前发现,每步一次的蹬离工作控制可以减少与平衡相关的努力,无论是在模拟中还是在人体参与者实验中。模拟还表明,根据身体状态的变化在每一步改变踝关节内翻/外翻扭矩可以辅助平衡。在本研究中,我们使用多驱动踝足假肢模拟器研究了踝关节内翻/外翻扭矩调制对截肢者( = 5)与平衡相关努力的影响。在稳定条件下,施加踝关节内翻/外翻扭矩的变化,以抵消健侧肢体脚趾离地瞬间左右重心加速度的偏差;向假肢侧的加速度越高,在随后的站立阶段就会产生一个纠正性的踝关节内翻扭矩。不稳定控制器则产生相反的效果,零增益控制器对名义内翻/外翻扭矩不做改变。为了将逐步控制与平均力学变化的潜在影响中与平衡相关的影响区分开来,在不同条件下平均踝关节内翻/外翻扭矩和假肢功保持恒定。与零增益控制器相比,高增益稳定控制使代谢成本降低了13%( = 0.05)。然后,在强制探索期后,我们研究了个体对特定受试者稳定控制器的反应。与零增益控制器相比,五名参与者中有四名的代谢率降低了(-15%、-14%、-11%、-6%和+4%),平均降低了9%( = 0.05)。所有条件下平均假肢力学不变,这表明能量经济性的改善可能来自与平衡相关的逐步校正的变化。内翻/外翻扭矩的逐步调制可用于新型主动踝足假肢,以减少与保持平衡相关的行走努力。