Kim Myunghee, Collins Steven H
Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, Pennsylvania, 15213, USA.
Robotics Institute, Carnegie Mellon University, Pittsburgh, Pennsylvania, 15213, USA.
J Neuroeng Rehabil. 2015 May 1;12:43. doi: 10.1186/s12984-015-0027-3.
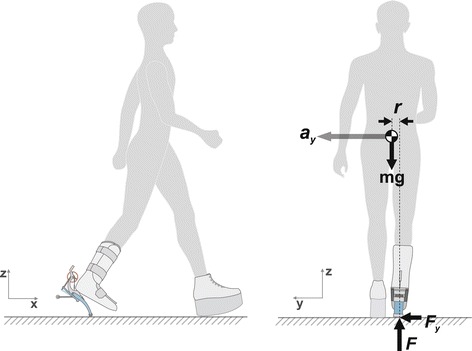
Individuals with below-knee amputation have more difficulty balancing during walking, yet few studies have explored balance enhancement through active prosthesis control. We previously used a dynamical model to show that prosthetic ankle push-off work affects both sagittal and frontal plane dynamics, and that appropriate step-by-step control of push-off work can improve stability. We hypothesized that this approach could be applied to a robotic prosthesis to partially fulfill the active balance requirements of human walking, thereby reducing balance-related activity and associated effort for the person using the device.
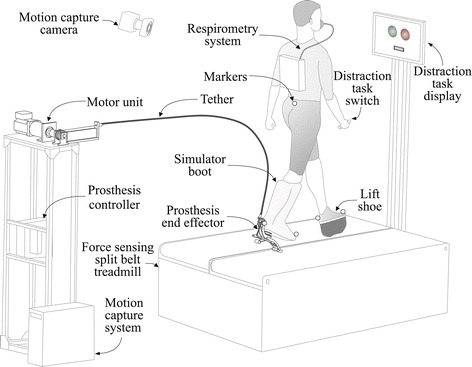
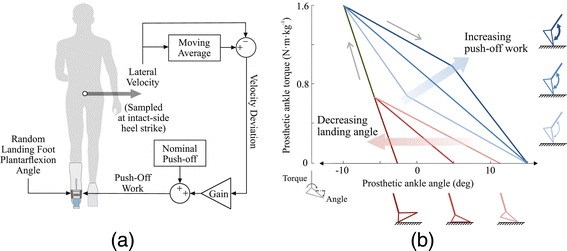
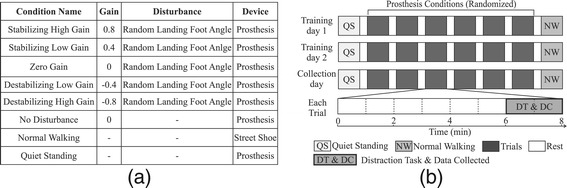
We conducted experiments on human participants (N = 10) with simulated amputation. Prosthetic ankle push-off work was varied on each step in ways expected to either stabilize, destabilize or have no effect on balance. Average ankle push-off work, known to affect effort, was kept constant across conditions. Stabilizing controllers commanded more push-off work on steps when the mediolateral velocity of the center of mass was lower than usual at the moment of contralateral heel strike. Destabilizing controllers enforced the opposite relationship, while a neutral controller maintained constant push-off work regardless of body state. A random disturbance to landing foot angle and a cognitive distraction task were applied, further challenging participants' balance. We measured metabolic rate, foot placement kinematics, center of pressure kinematics, distraction task performance, and user preference in each condition. We expected the stabilizing controller to reduce active control of balance and balance-related effort for the user, improving user preference.
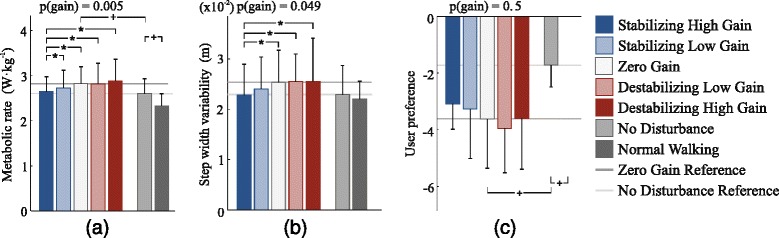
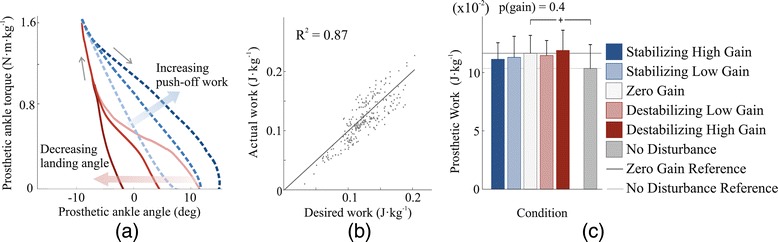
The best stabilizing controller lowered metabolic rate by 5.5% (p = 0.003) and 8.5% (p = 0.02), and step width variability by 10.0% (p = 0.009) and 10.7% (p = 0.03) compared to conditions with no control and destabilizing control, respectively. Participants tended to prefer stabilizing controllers. These effects were not due to differences in average push-off work, which was unchanged across conditions, or to average gait mechanics, which were also unchanged. Instead, benefits were derived from step-by-step adjustments to prosthesis behavior in response to variations in mediolateral velocity at heel strike.
Once-per-step control of prosthetic ankle push-off work can reduce both active control of foot placement and balance-related metabolic energy use during walking.
膝下截肢者在行走过程中平衡难度更大,但很少有研究探索通过主动控制假肢来增强平衡能力。我们之前使用动力学模型表明,假肢踝关节蹬离功会影响矢状面和额状面的动力学,并且对蹬离功进行适当的逐步控制可以提高稳定性。我们假设这种方法可以应用于机器人假肢,以部分满足人类行走时的主动平衡需求,从而减少使用该设备的人的平衡相关活动及相关努力。
我们对10名模拟截肢的人类参与者进行了实验。在每一步中,假肢踝关节蹬离功以预期会稳定、破坏或不影响平衡的方式进行变化。已知会影响努力程度的平均踝关节蹬离功在各条件下保持恒定。稳定控制器在对侧脚跟触地瞬间质心的内外侧速度低于正常时,会在各步中指令更多的蹬离功。破坏稳定控制器则强制实施相反的关系,而中性控制器无论身体状态如何都保持恒定的蹬离功。对着地脚角度施加随机干扰和进行认知分心任务,进一步挑战参与者的平衡能力。我们测量了每种条件下的代谢率、足部放置运动学、压力中心运动学、分心任务表现和用户偏好。我们预期稳定控制器能减少用户对平衡的主动控制和与平衡相关的努力,提高用户偏好。
与无控制和破坏稳定控制的条件相比,最佳稳定控制器分别使代谢率降低了5.5%(p = 0.003)和8.5%(p = 0.02),步宽变异性降低了1(p = 0.009)和10.7%(p = 0.03)。参与者倾向于更喜欢稳定控制器。这些效果并非由于平均蹬离功的差异(各条件下该值不变)或平均步态力学的差异(这些也未改变)。相反,益处来自于根据脚跟触地时内外侧速度的变化对假肢行为进行的逐步调整。
对假肢踝关节蹬离功进行每步一次的控制可以减少行走过程中对足部放置的主动控制以及与平衡相关的代谢能量消耗。