Department for Trauma Surgery, Orthopedics and Plastic Surgery, University Medical Center Göttingen, Von-Siebold-Str. 3, 37075, Göttingen, Germany.
Faculty of Life Sciences, University of Applied Sciences (HAW), Ulmenliet 20, 21033, Hamburg, Germany.
J Neuroeng Rehabil. 2018 Mar 27;15(1):28. doi: 10.1186/s12984-018-0371-1.
To effectively replace the human hand, a prosthesis should seamlessly respond to user intentions but also convey sensory information back to the user. Restoration of sensory feedback is rated highly by the prosthesis users, and feedback is critical for grasping in able-bodied subjects. Nonetheless, the benefits of feedback in prosthetics are still debated. The lack of consensus is likely due to the complex nature of sensory feedback during prosthesis control, so that its effectiveness depends on multiple factors (e.g., task complexity, user learning).
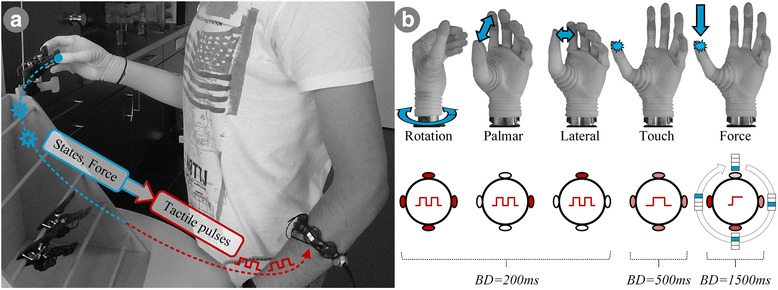
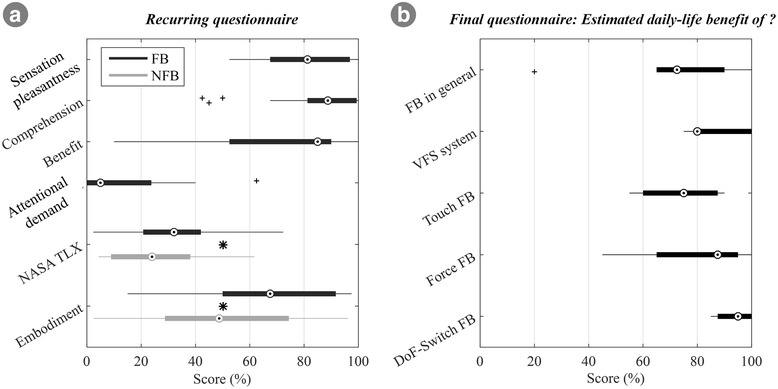
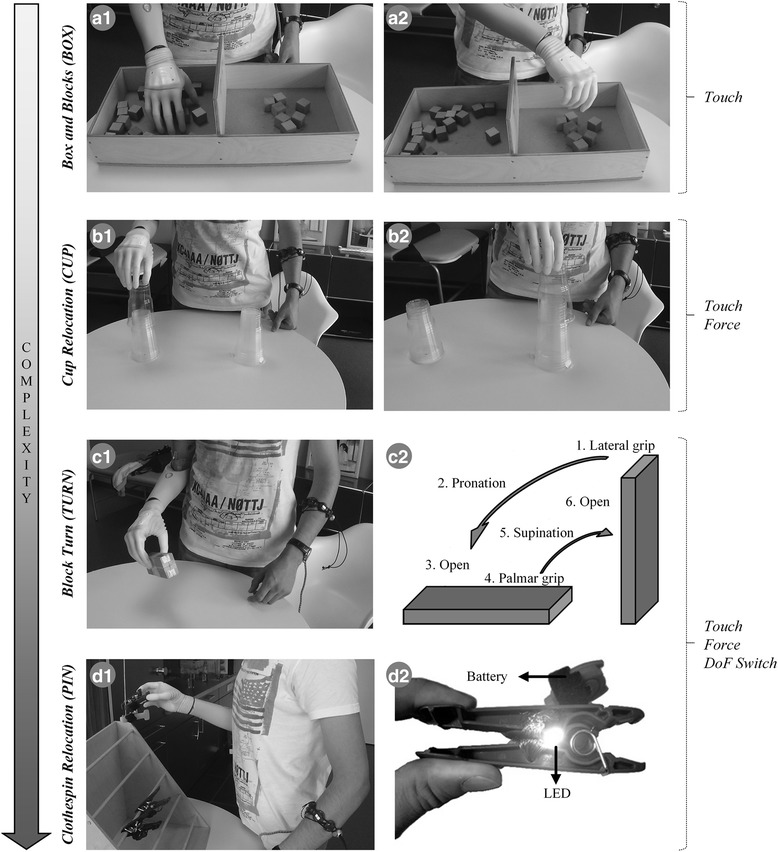
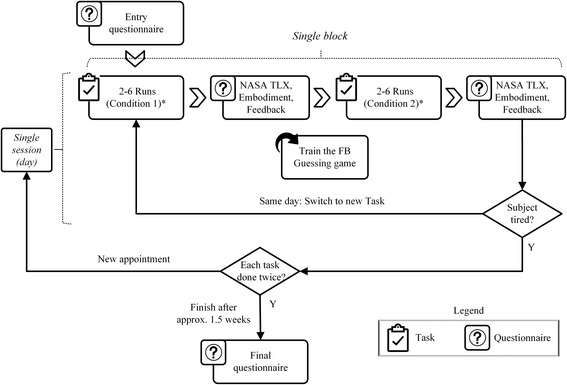
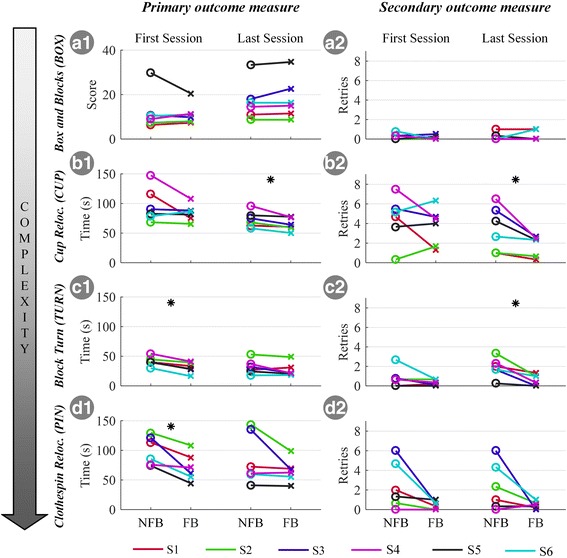
We evaluated the impact of these factors with a longitudinal assessment in six amputee subjects, using a clinical setup (socket, embedded control) and a range of tasks (box and blocks, block turn, clothespin and cups relocation). To provide feedback, we have proposed a novel vibrotactile stimulation scheme capable of transmitting multiple variables from a multifunction prosthesis. The subjects wore a bracelet with four by two uniformly placed vibro-tactors providing information on contact, prosthesis state (active function), and grasping force. The subjects also completed a questionnaire for the subjective evaluation of the feedback.
The tests demonstrated that feedback was beneficial only in the complex tasks (block turn, clothespin and cups relocation), and that the training had an important, task-dependent impact. In the clothespin relocation and block turn tasks, training allowed the subjects to establish successful feedforward control, and therefore, the feedback became redundant. In the cups relocation task, however, the subjects needed some training to learn how to properly exploit the feedback. The subjective evaluation of the feedback was consistently positive, regardless of the objective benefits. These results underline the multifaceted nature of closed-loop prosthesis control as, depending on the context, the same feedback interface can have different impact on performance. Finally, even if the closed-loop control does not improve the performance, it could be beneficial as it seems to improve the subjective experience.
Therefore, in this study we demonstrate, for the first time, the relevance of an advanced, multi-variable feedback interface for dexterous, multi-functional prosthesis control in a clinically relevant setting.
为了有效替代人手,假肢不仅应无缝响应用户意图,还应将感觉信息反馈给用户。感觉反馈对假肢使用者的评价很高,而反馈对健全人抓握至关重要。尽管如此,假肢中反馈的好处仍存在争议。缺乏共识的原因可能是假肢控制过程中感觉反馈的复杂性,因此其有效性取决于多个因素(例如,任务复杂性,用户学习)。
我们通过对六位截肢者进行纵向评估,使用临床设置(插座,嵌入式控制)和一系列任务(盒子和积木,积木转弯,别针和杯子重新定位)来评估这些因素的影响。为了提供反馈,我们提出了一种新颖的振动触觉刺激方案,该方案能够从多功能假肢传输多个变量。受试者佩戴带有四个两排均匀放置的振动器的手链,以提供接触,假肢状态(主动功能)和抓握力的信息。受试者还完成了一份关于反馈主观评估的问卷。
测试表明,只有在复杂任务(积木转弯,别针和杯子重新定位)中,反馈才是有益的,并且训练对任务有重要的,依赖于任务的影响。在别针重新定位和积木转弯任务中,训练使受试者能够建立成功的前馈控制,因此反馈变得多余。然而,在杯子重新定位任务中,受试者需要一些训练才能学会如何正确利用反馈。无论客观收益如何,反馈的主观评估始终是积极的。这些结果强调了闭环假肢控制的多方面性质,因为根据上下文,相同的反馈界面对性能可能产生不同的影响。最后,即使闭环控制不能提高性能,它也可能是有益的,因为它似乎可以改善主观体验。
因此,在这项研究中,我们首次在临床相关环境中证明了先进的多变量反馈接口对于灵巧的多功能假肢控制的相关性。