Department of Physiology, College of Medicine, University of Arizona, Tucson AZ, United states of America.
J Neural Eng. 2018 Aug;15(4):046007. doi: 10.1088/1741-2552/aabc9a. Epub 2018 Apr 9.
A variety of bioengineering systems are being developed to restore tactile sensations in individuals who have lost somatosensory feedback because of spinal cord injury, stroke, or amputation. These systems typically detect tactile force with sensors placed on an insensate hand (or prosthetic hand in the case of amputees) and deliver touch information by electrically or mechanically stimulating sensate skin above the site of injury. Successful object manipulation, however, also requires proprioceptive feedback representing the configuration and movements of the hand and digits.
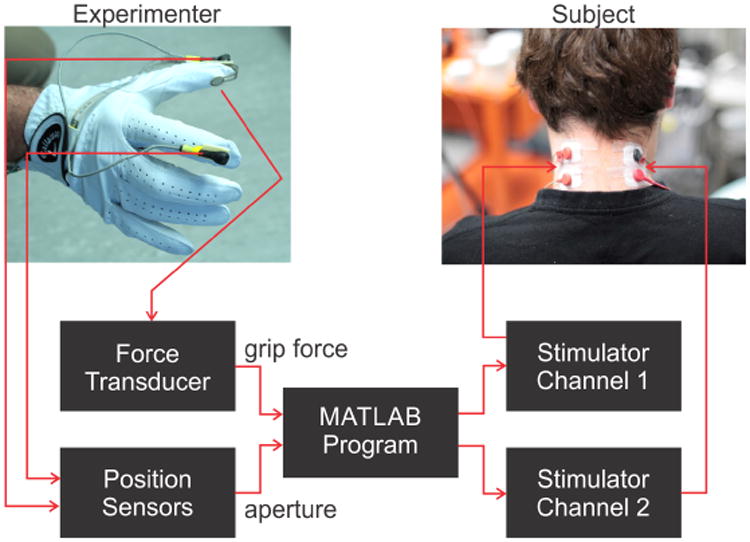
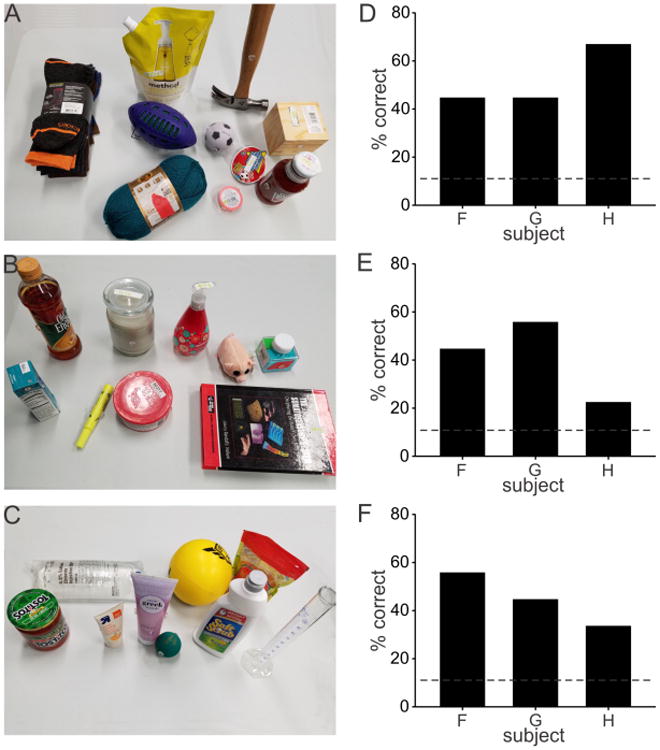
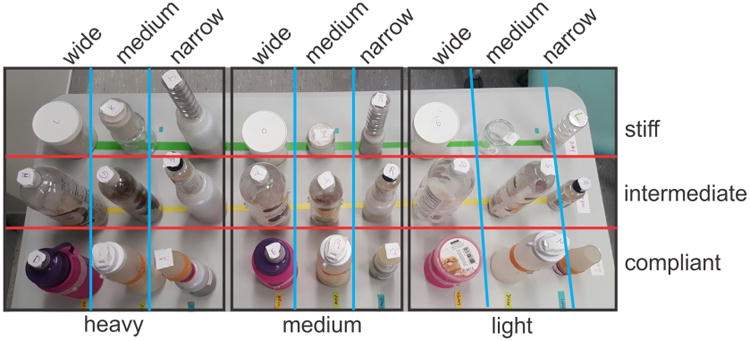
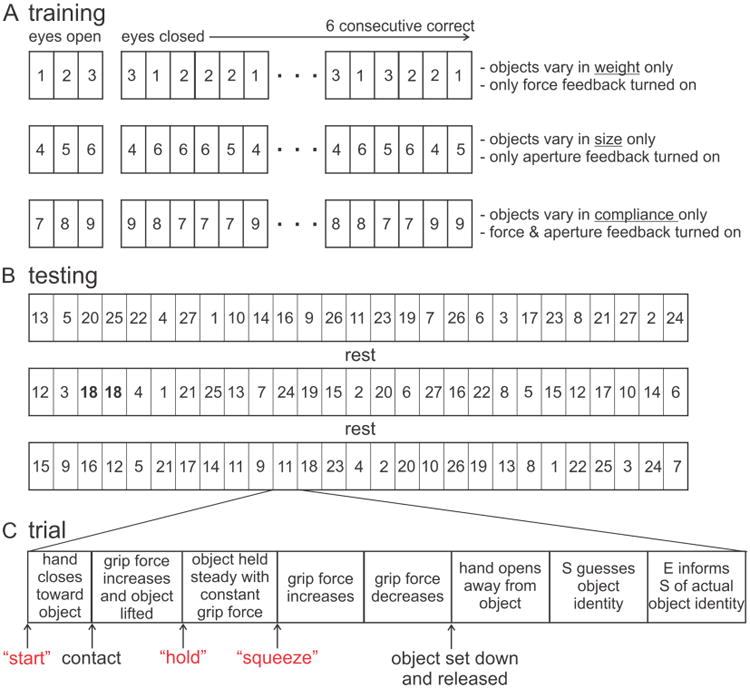
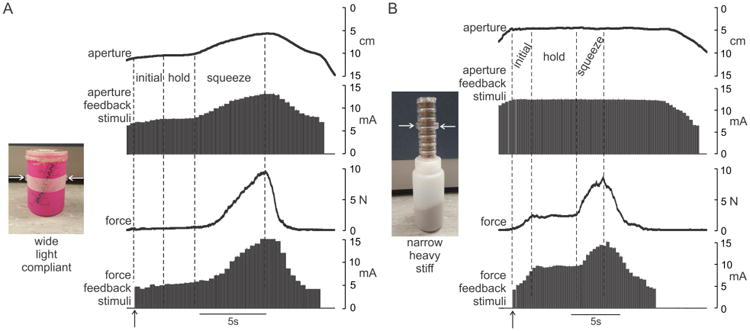
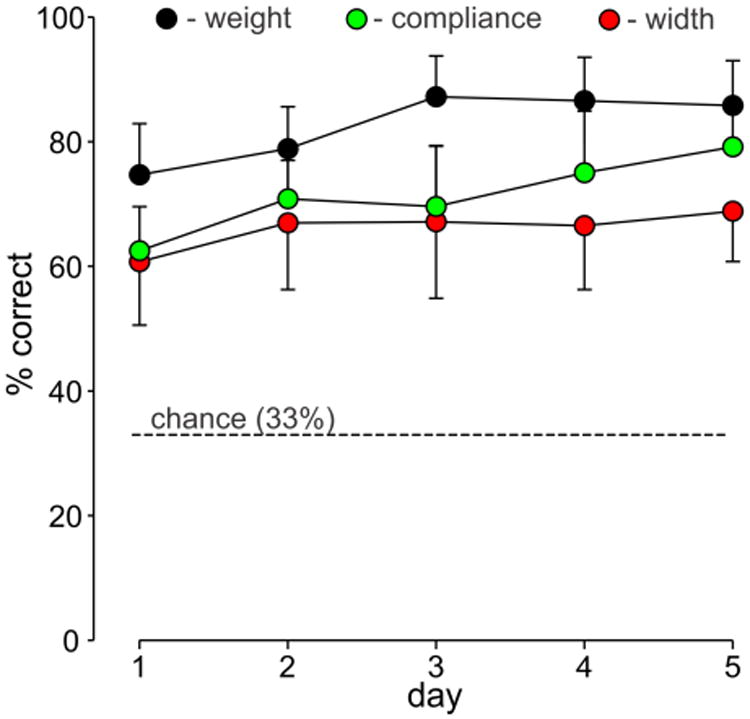
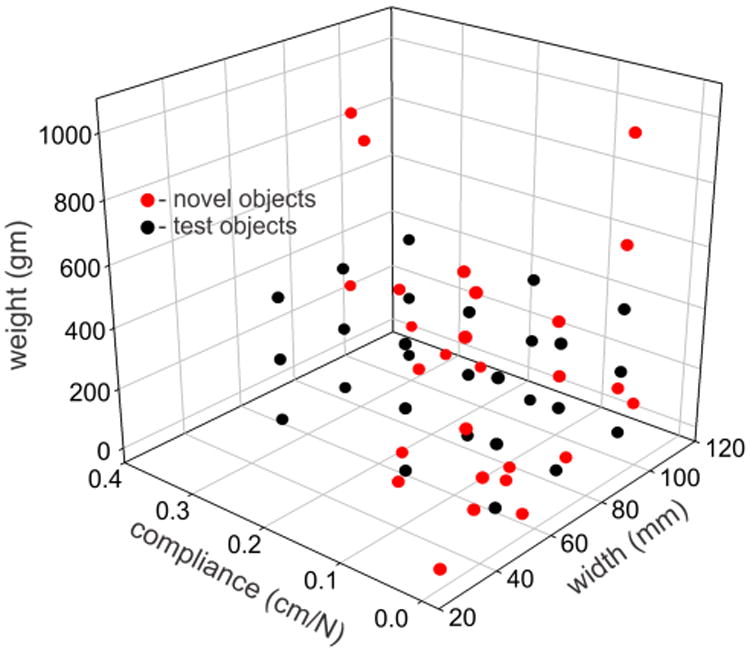
Therefore, we developed a simple system that simultaneously provides information about tactile grip force and hand aperture using current amplitude-modulated electrotactile feedback. We evaluated the utility of this system by testing the ability of eight healthy human subjects to distinguish among 27 objects of varying sizes, weights, and compliances based entirely on electrotactile feedback. The feedback was modulated by grip-force and hand-aperture sensors placed on the hand of an experimenter (not visible to the subject) grasping and lifting the test objects. We were also interested to determine the degree to which subjects could learn to use such feedback when tested over five consecutive sessions.
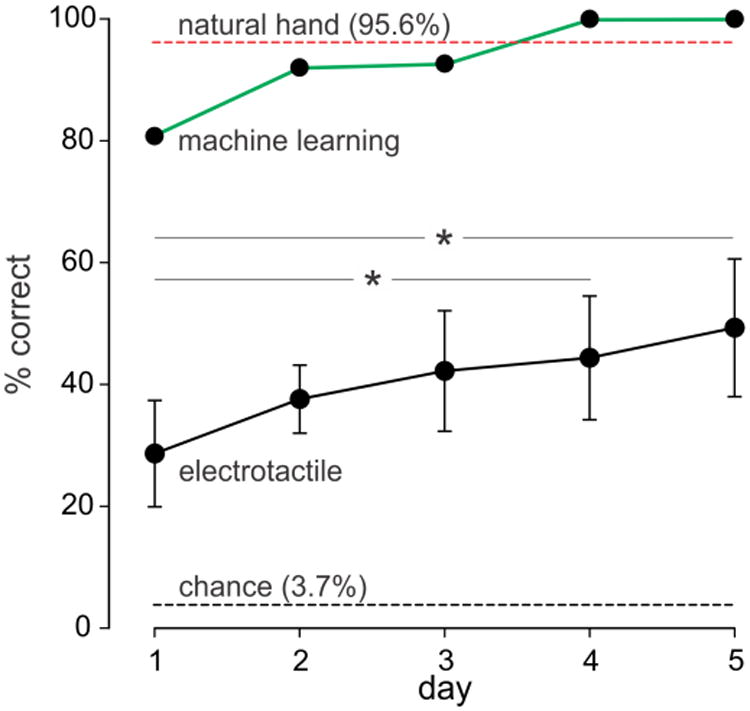
The average percentage correct identifications on day 1 (28.5% ± 8.2% correct) was well above chance (3.7%) and increased significantly with training to 49.2% ± 10.6% on day 5. Furthermore, this training transferred reasonably well to a set of novel objects.
These results suggest that simple, non-invasive methods can provide useful multisensory feedback that might prove beneficial in improving the control over prosthetic limbs.
为了恢复因脊髓损伤、中风或截肢而丧失触觉反馈的个体的触觉,各种生物工程系统正在被开发出来。这些系统通常通过放置在无感觉的手上的传感器(对于截肢者来说是假肢手)来检测触觉力,并通过电或机械刺激受伤部位上方的敏感皮肤来传递触觉信息。然而,成功的物体操作还需要代表手和手指的配置和运动的本体感受反馈。
因此,我们开发了一种简单的系统,该系统使用电流幅度调制的电触觉反馈同时提供关于触觉握力和手开口的信息。我们通过测试八个健康人类受试者根据完全基于电触觉反馈来区分 27 个不同大小、重量和顺应性的物体的能力,评估了该系统的实用性。反馈由放置在实验者(受试者不可见)手上的握力和手开口传感器调制,该实验者握持和提起测试物体。我们还想确定在连续五次测试中,受试者可以在多大程度上学会使用这种反馈。
第 1 天的平均正确识别百分比(28.5%±8.2%正确)明显高于偶然(3.7%),并随着训练显著增加到第 5 天的 49.2%±10.6%。此外,这种训练相当好地转移到了一组新的物体上。
这些结果表明,简单、非侵入性的方法可以提供有用的多感觉反馈,这可能有助于改善对假肢的控制。