Marcireau Alexandre, Ieng Sio-Hoi, Simon-Chane Camille, Benosman Ryad B
Institut National de la Santé et de la Recherche Médicale, UMRI S 968, Sorbonne Universites, UPMC Univ Paris 06, UMR S 968, Centre National de la Recherche Scientifique, UMR 7210, Institut de la Vision, Paris, France.
Front Neurosci. 2018 Apr 11;12:135. doi: 10.3389/fnins.2018.00135. eCollection 2018.
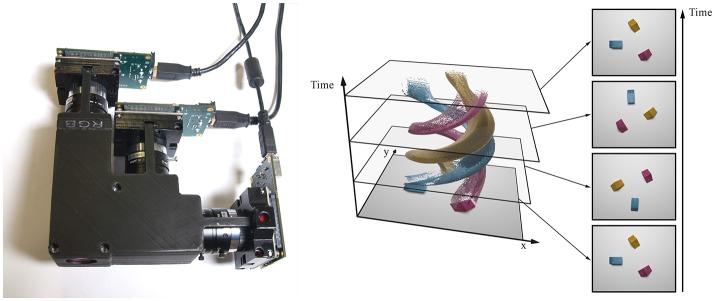
This paper introduces a color asynchronous neuromorphic event-based camera and a methodology to process color output from the device to perform color segmentation and tracking at the native temporal resolution of the sensor (down to one microsecond). Our color vision sensor prototype is a combination of three Asynchronous Time-based Image Sensors, sensitive to absolute color information. We devise a color processing algorithm leveraging this information. It is designed to be computationally cheap, thus showing how low level processing benefits from asynchronous acquisition and high temporal resolution data. The resulting color segmentation and tracking performance is assessed both with an indoor controlled scene and two outdoor uncontrolled scenes. The tracking's mean error to the ground truth for the objects of the outdoor scenes ranges from two to twenty pixels.
本文介绍了一种彩色异步神经形态事件相机以及一种处理该设备彩色输出的方法,以便在传感器的原生时间分辨率(低至一微秒)下执行颜色分割和跟踪。我们的彩色视觉传感器原型是三个基于异步时间的图像传感器的组合,对绝对颜色信息敏感。我们设计了一种利用此信息的颜色处理算法。它被设计为计算成本低,从而展示了低级处理如何从异步采集和高时间分辨率数据中受益。通过一个室内受控场景和两个室外非受控场景对所得的颜色分割和跟踪性能进行了评估。室外场景中物体跟踪相对于地面真值的平均误差范围为两到二十像素。