Liu Chang, Macedo Lucas De, Finley James M
Department of Biomedical Engineering, University of Southern California, Los Angeles, CA, United States.
Departamento de Engenharia Eletrica, Universidade de Brasília, Brasília, Brazil.
Front Hum Neurosci. 2018 Jun 27;12:251. doi: 10.3389/fnhum.2018.00251. eCollection 2018.
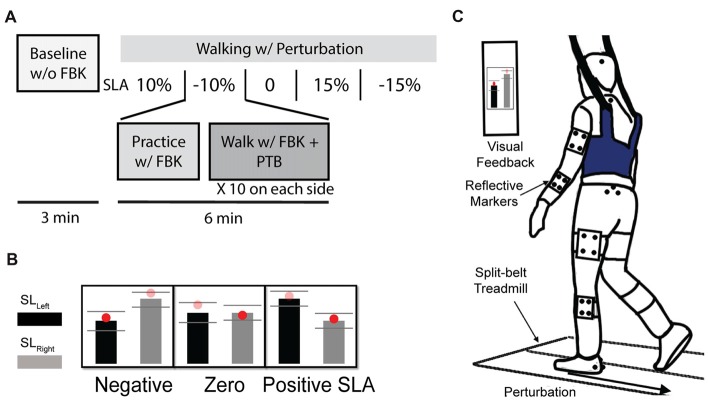
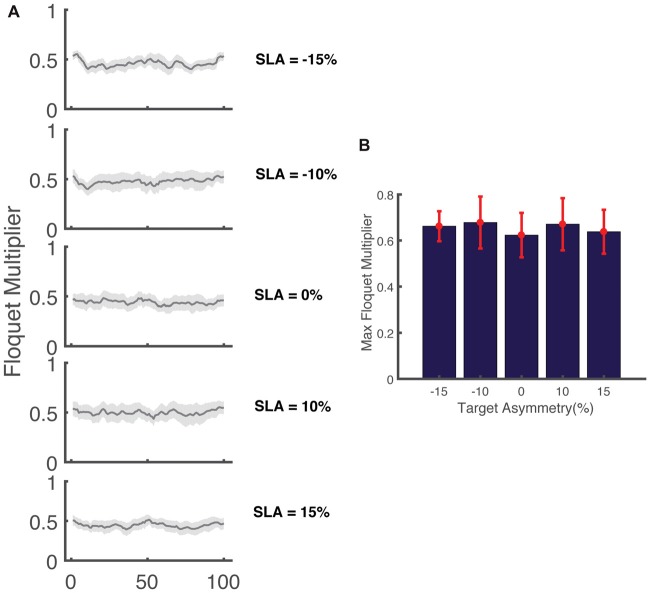
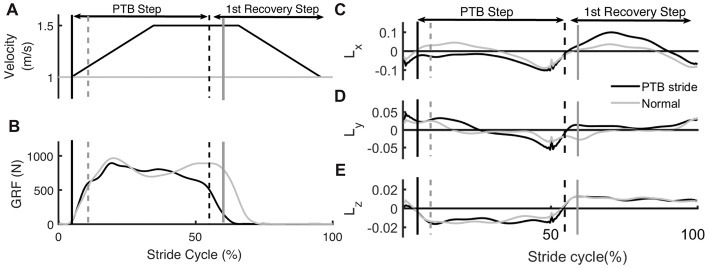
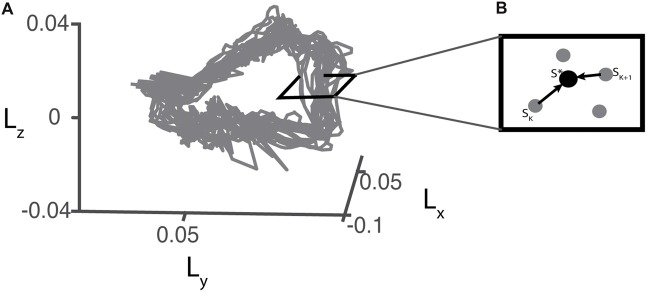
The ability to maintain dynamic balance in response to unexpected perturbations during walking is largely mediated by reactive control strategies. Reactive control during perturbed walking can be characterized by multiple metrics such as measures of whole-body angular momentum (WBAM), which capture the rotational dynamics of the body, and through Floquet analysis which captures the orbital stability of a limit cycle attractor. Recent studies have demonstrated that people with spatiotemporal asymmetries during gait have impaired control of whole-body dynamics as evidenced by higher peak-to-peak ranges of WBAM over the gait cycle. While this may suggest that spatiotemporal asymmetries could impair stability, no studies have quantified how direct modification of asymmetry influences reactive balance control. Here, we used a biofeedback paradigm that allows participants to systematically adopt different levels of step length asymmetry to test the hypothesis that walking asymmetrically impairs the reactive control of balance. In addition, we tested the hypothesis that perturbations to the non-dominant leg would cause less whole-body rotation due to its hypothesized role in weight support during walking. We characterized reactive control strategies in two ways. We first computed integrated angular momentum to characterize changes in whole-body configuration during multi-step responses to perturbations. We also computed the maximum Floquet multipliers (FMs) across the gait cycle, which represent the rate of convergence back to limit cycle behavior. Our results show that integrated angular momentum during the perturbation step and subsequent recovery steps, as well as the magnitude of maximum FMs over the gait cycle, do not change across levels of asymmetry. However, our results showed both limb-dependent and limb-independent responses to unexpected perturbations. Overall, our findings suggest that there is no causal relationship between step length asymmetry and impaired reactive control of balance in the absence of neuromotor impairments. Our approach could be used in future studies to determine if reducing asymmetries in populations with neuromotor impairments, such people post-stroke or amputees improves dynamic stability.
在行走过程中,对意外扰动做出反应以维持动态平衡的能力很大程度上由反应控制策略介导。在受扰行走过程中的反应控制可以通过多种指标来表征,例如全身角动量(WBAM)的测量,它捕捉身体的旋转动力学,以及通过弗洛凯分析,它捕捉极限环吸引子的轨道稳定性。最近的研究表明,步态存在时空不对称的人对全身动力学的控制受损,这在步态周期中WBAM的峰峰值范围更高上得到了证明。虽然这可能表明时空不对称会损害稳定性,但尚无研究量化不对称的直接改变如何影响反应性平衡控制。在这里,我们使用了一种生物反馈范式,使参与者能够系统地采用不同程度的步长不对称,以检验行走不对称会损害平衡反应控制这一假设。此外,我们还检验了这样一个假设,即对非优势腿的扰动由于其在行走过程中对体重支撑的假定作用,会导致较少的全身旋转。我们通过两种方式表征反应控制策略。我们首先计算积分角动量,以表征在对扰动的多步反应过程中全身配置的变化。我们还计算了整个步态周期内的最大弗洛凯乘数(FMs),它代表回到极限环行为的收敛速率。我们的结果表明,在扰动步及随后的恢复步期间的积分角动量,以及整个步态周期内最大FMs的大小,在不同程度的不对称情况下都不会改变。然而,我们的结果显示了对意外扰动的肢体依赖性和非肢体依赖性反应。总体而言,我们的研究结果表明,在没有神经运动障碍的情况下,步长不对称与平衡反应控制受损之间没有因果关系。我们的方法可用于未来的研究,以确定减少神经运动障碍人群(如中风后患者或截肢者)的不对称是否能改善动态稳定性。