Department of Biomedical Engineering, University of Southern California, Los Angeles, CA, United States of America.
Division of Biokinesiology and Physical Therapy, University of Southern California, Los Angeles, CA, United States of America.
PLoS One. 2020 May 21;15(5):e0224187. doi: 10.1371/journal.pone.0224187. eCollection 2020.
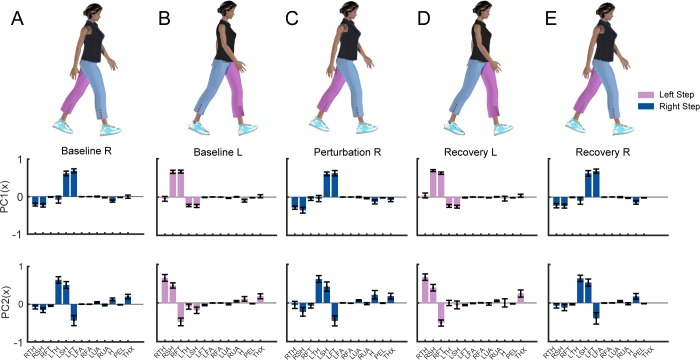
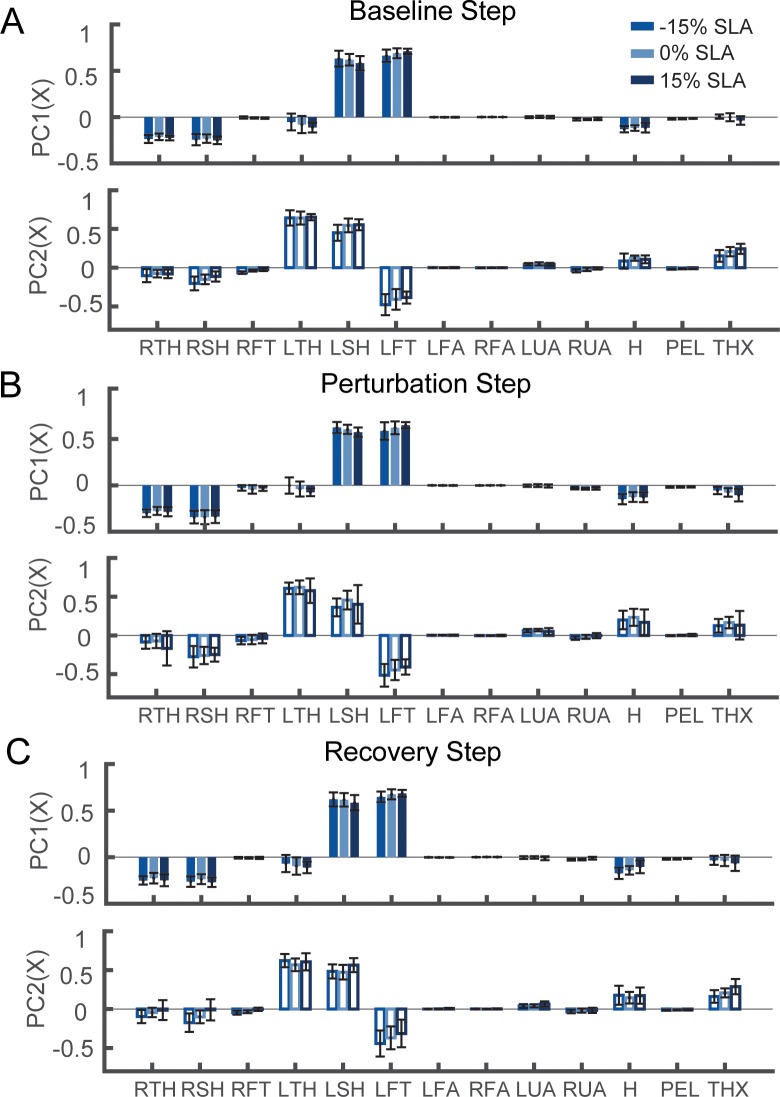
Recovery from perturbations during walking is primarily mediated by reactive control strategies that coordinate multiple body segments to maintain balance. Balance control is often impaired in clinical populations who walk with spatiotemporally asymmetric gait, and, as a result, rehabilitation efforts often seek to reduce asymmetries in these populations. Previous work has demonstrated that the presence of spatiotemporal asymmetries during walking does not impair the control of whole-body dynamics during perturbation recovery. However, it remains to be seen how the neuromotor system adjusts intersegmental coordination patterns to maintain invariant whole-body dynamics. Here, we determined if the neuromotor system generates stereotypical coordination patterns irrespective of the level of asymmetry or if the neuromotor system allows for variance in intersegmental coordination patterns to stabilize whole-body dynamics in the sagittal plane. Nineteen healthy participants walked on a dual-belt treadmill at a range of step length asymmetries, and they responded to unpredictable, slip-like perturbations. We used principal component analysis of segmental angular momenta to characterize intersegmental coordination patterns before, during, and after imposed perturbations. We found that two principal components were sufficient to explain ~ 95% of the variance in segmental angular momentum during both steady-state walking and responses to perturbations. Our results also revealed that walking with asymmetric step lengths led to changes in intersegmental coordination patterns during the perturbation and during subsequent recovery steps without affecting whole-body angular momentum. These results suggest that the nervous system allows for variance in segment-level coordination patterns to maintain invariant control of whole-body angular momentum during walking. Future studies exploring how these segmental coordination patterns change in individuals with asymmetries that result from neuromotor impairments can provide further insight into how the healthy and impaired nervous system regulates dynamic balance during walking.
行走过程中对扰动的恢复主要通过反应性控制策略来实现,该策略协调多个身体部位以保持平衡。患有时空不对称步态的临床患者的平衡控制能力通常会受到损害,因此,康复工作通常旨在减少这些人群的步态不对称。先前的研究已经表明,行走时空不对称性的存在不会损害扰动恢复过程中全身动力学的控制。然而,尚不清楚运动神经系统如何调整节段间协调模式以保持不变的全身动力学。在这里,我们确定运动神经系统是否会产生不变的协调模式,而与不对称的程度无关,或者运动神经系统是否允许节段间协调模式存在变化,以稳定矢状面的全身动力学。十九名健康参与者在双带跑步机上以不同的步长不对称行走,并对不可预测的、类似滑倒的扰动做出反应。我们使用节段角动量的主成分分析来描述在施加扰动之前、期间和之后的节段间协调模式。我们发现,在稳态行走和对扰动的响应中,两个主成分足以解释节段角动量的~95%的变化。我们的结果还表明,不对称的步长行走会导致扰动期间和随后的恢复步骤中节段间协调模式发生变化,而不会影响全身角动量。这些结果表明,神经系统允许节段水平协调模式存在变化,以在行走过程中保持全身角动量的不变控制。未来探索具有神经运动障碍引起的不对称的个体中这些节段协调模式如何变化的研究,可以进一步深入了解健康和受损神经系统如何在行走过程中调节动态平衡。