Rongala Udaya B, Spanne Anton, Mazzoni Alberto, Bengtsson Fredrik, Oddo Calogero M, Jörntell Henrik
The BioRobotics Institute, Scuola Superiore Sant'Anna, Pisa, Italy.
Section for Neurobiology, Department of Experimental Medical Sciences, Biomedical Center, Lund University, Lund, Sweden.
Front Cell Neurosci. 2018 Jul 31;12:210. doi: 10.3389/fncel.2018.00210. eCollection 2018.
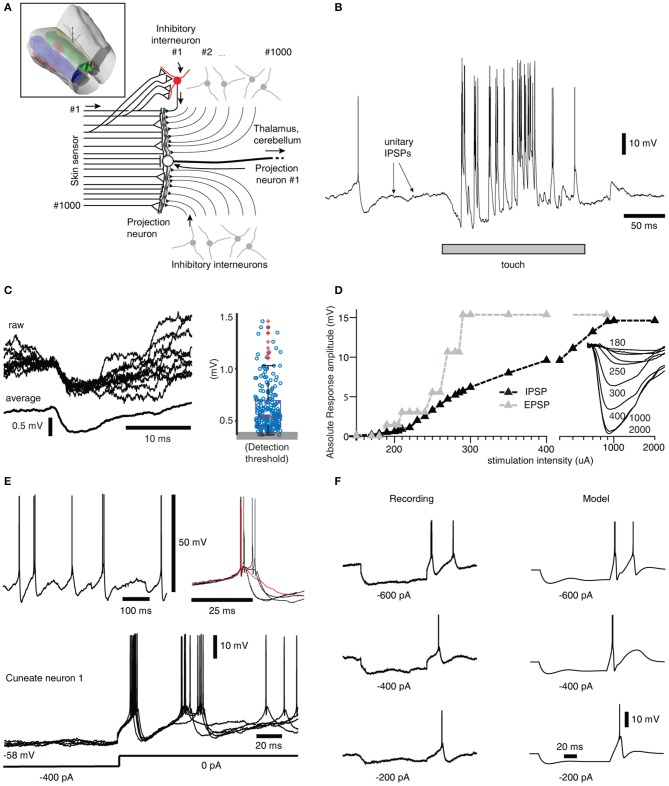
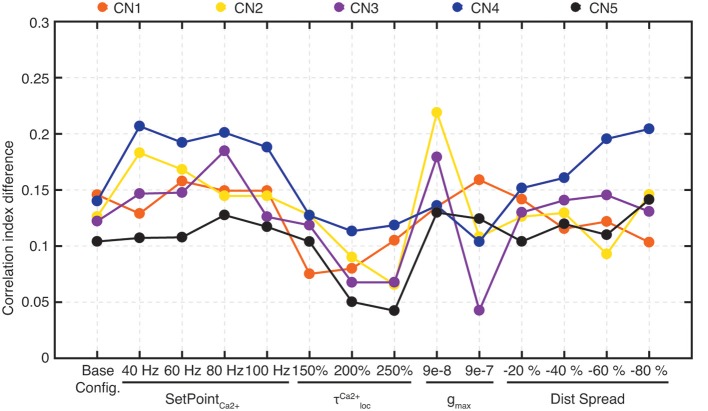
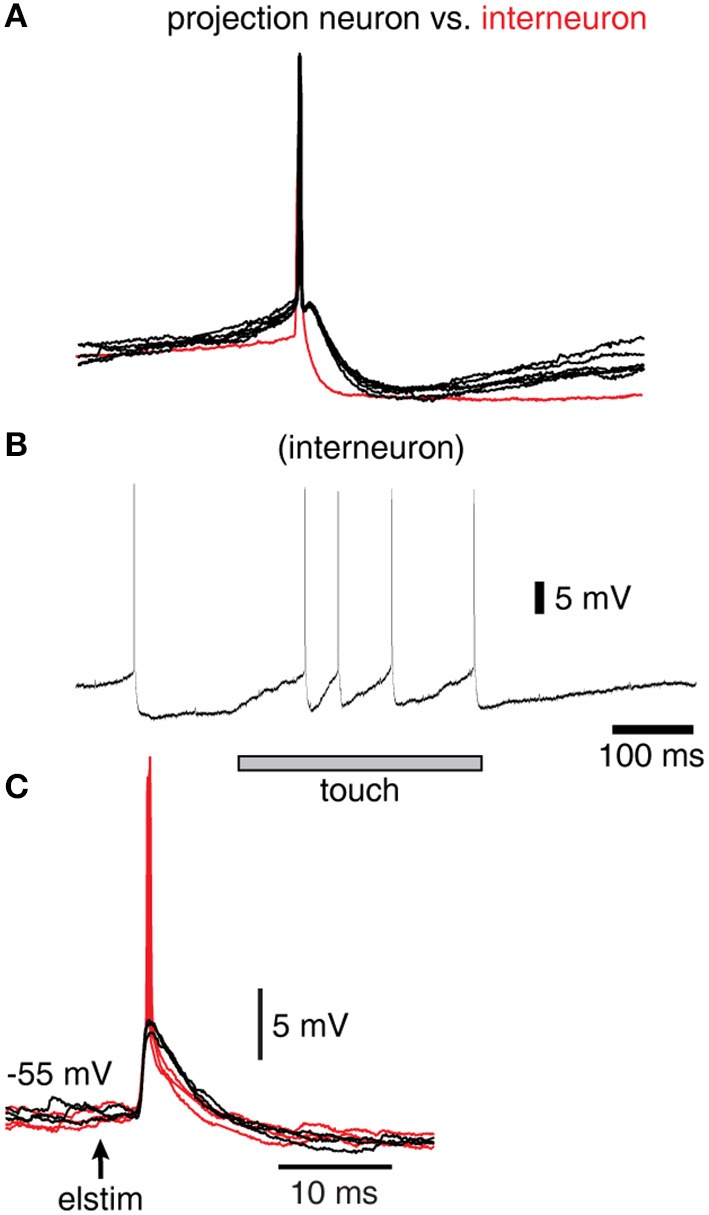
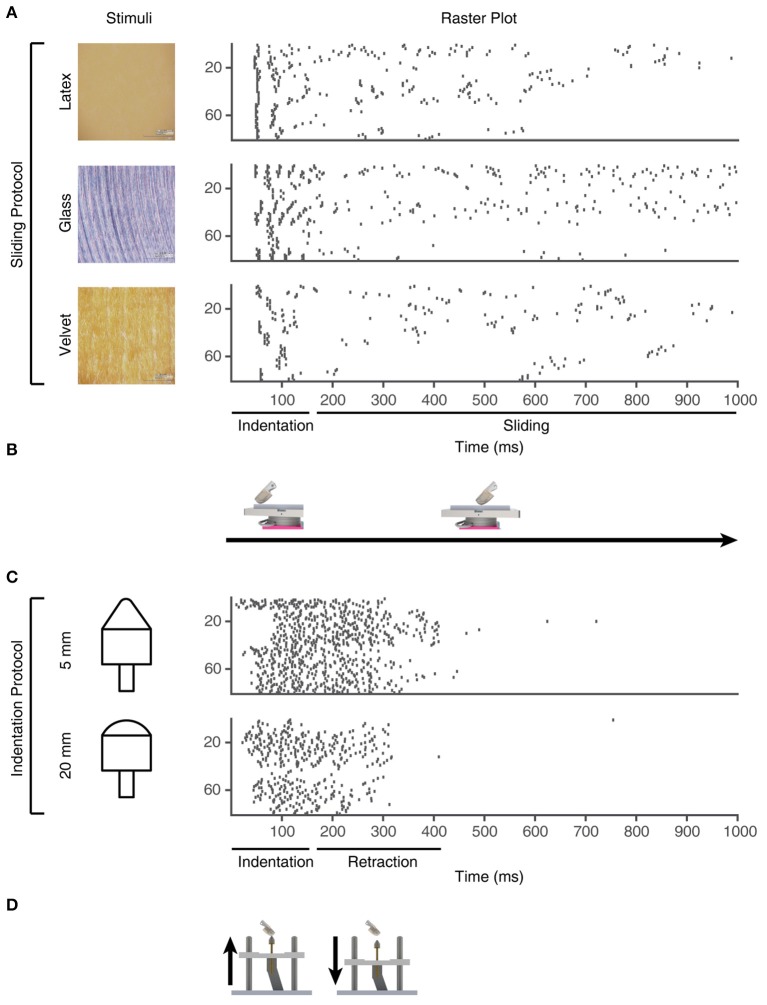
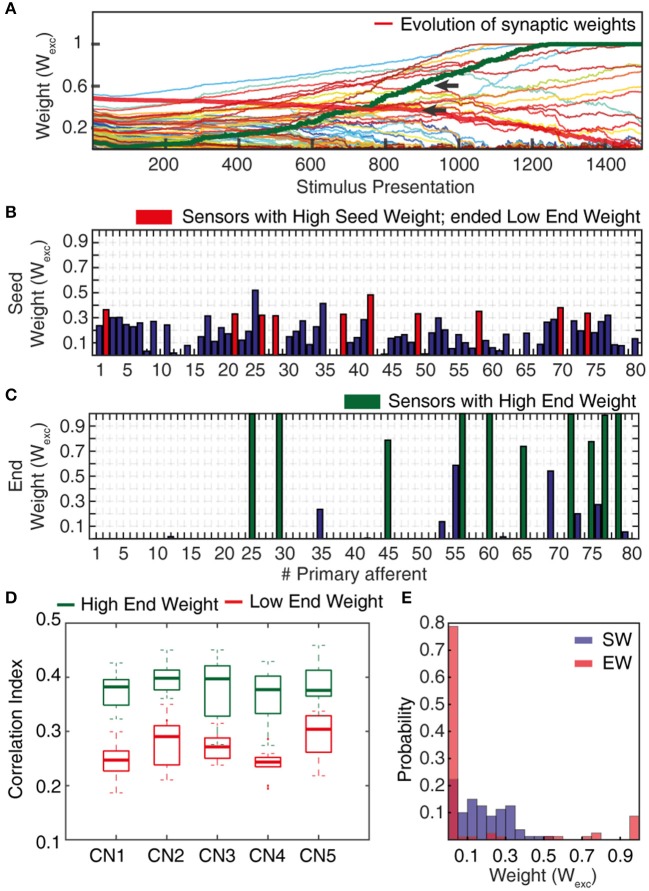
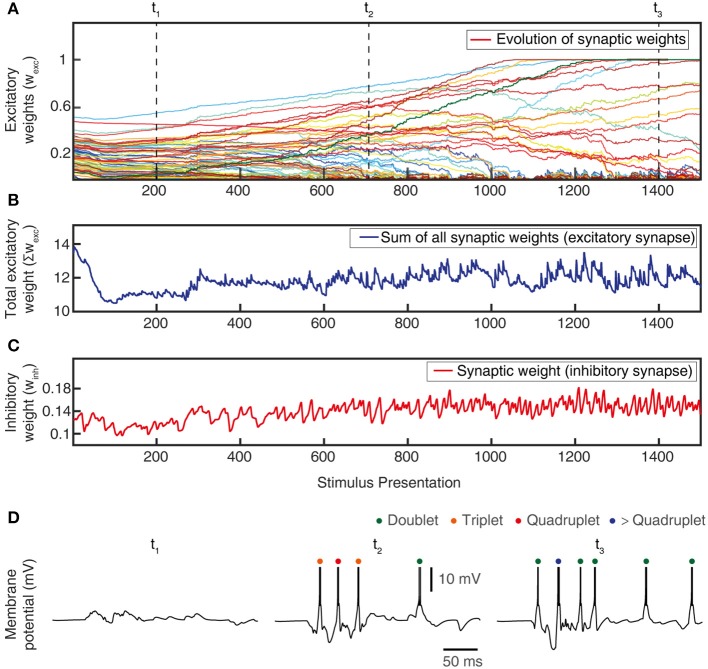
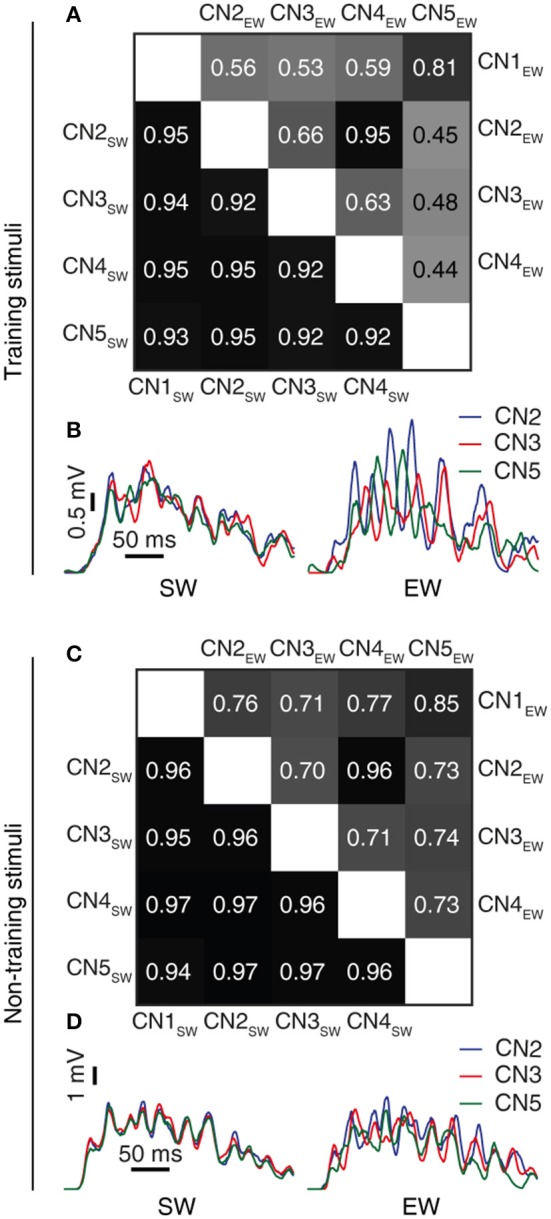
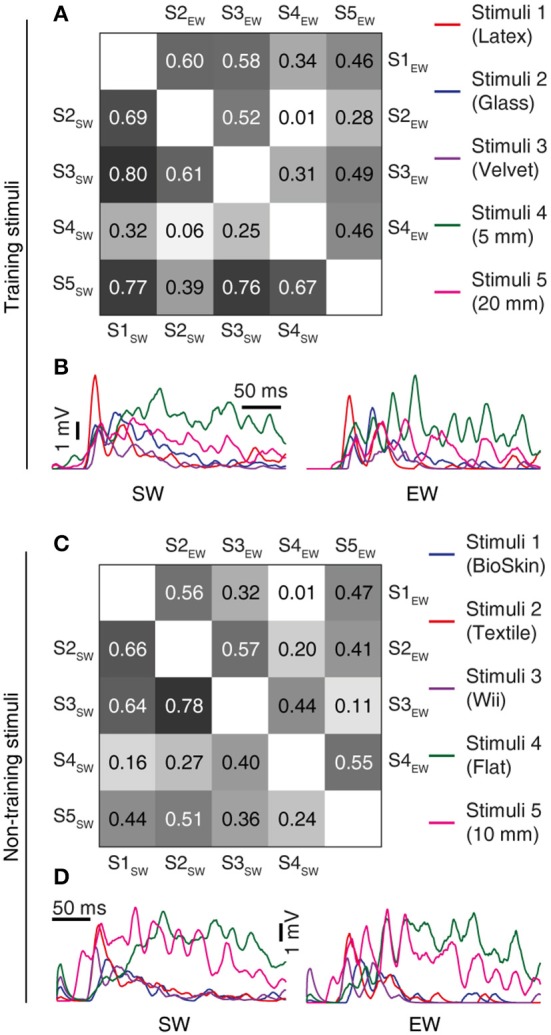
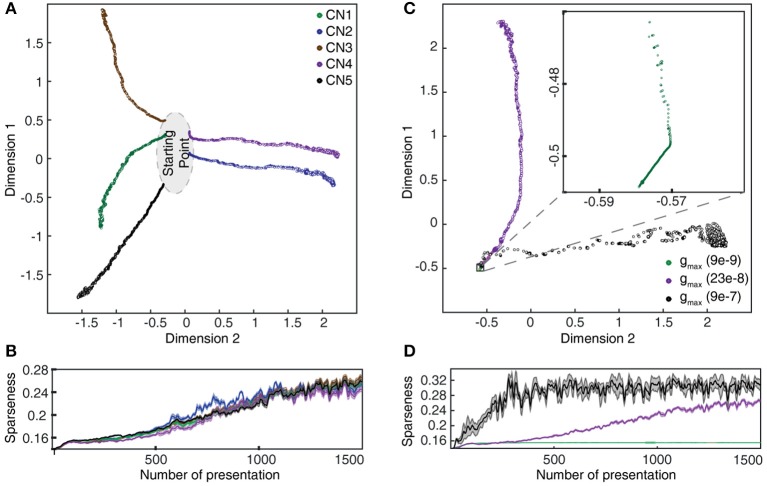
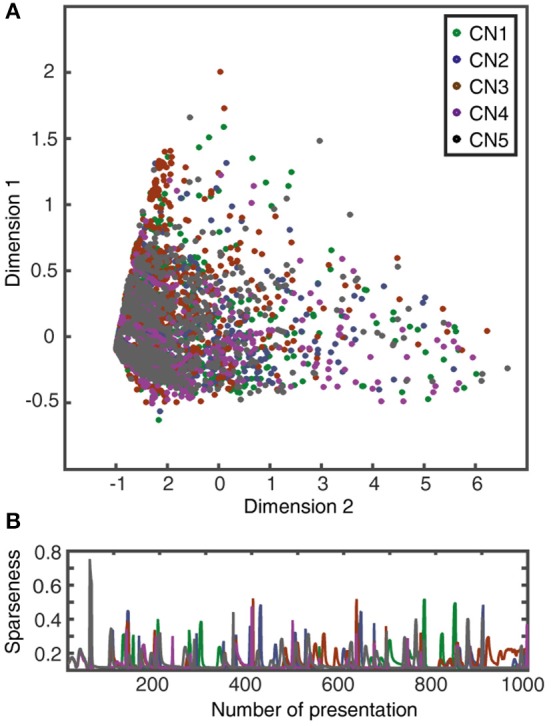
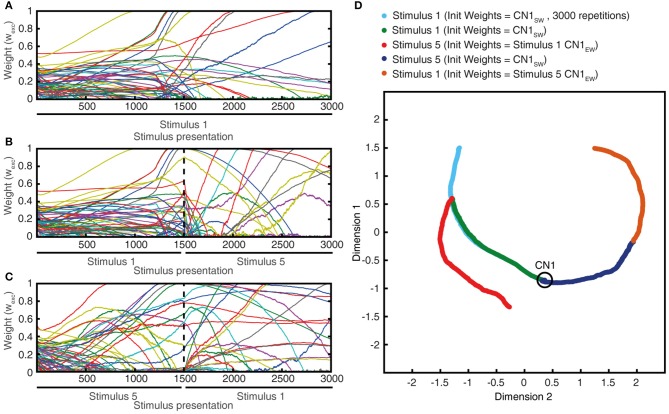
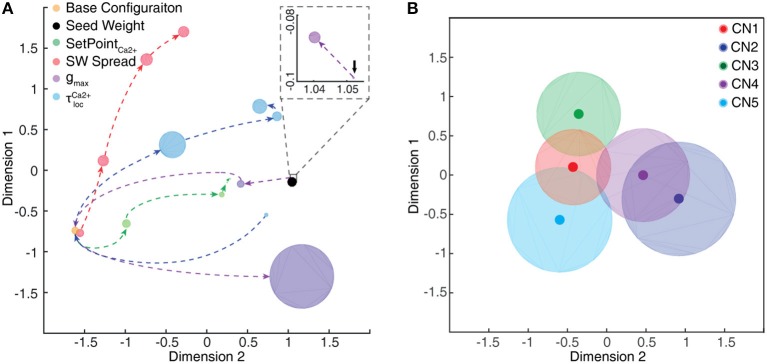
How the brain represents the external world is an unresolved issue for neuroscience, which could provide fundamental insights into brain circuitry operation and solutions for artificial intelligence and robotics. The neurons of the cuneate nucleus form the first interface for the sense of touch in the brain. They were previously shown to have a highly skewed synaptic weight distribution for tactile primary afferent inputs, suggesting that their connectivity is strongly shaped by learning. Here we first characterized the intracellular dynamics and inhibitory synaptic inputs of cuneate neurons and modeled their integration of tactile sensory inputs. We then replaced the tactile inputs with input from a sensorized bionic fingertip and modeled the learning-induced representations that emerged from varied sensory experiences. The model reproduced both the intrinsic membrane dynamics and the synaptic weight distributions observed in cuneate neurons . In terms of higher level model properties, individual cuneate neurons learnt to identify specific sets of correlated sensors, which at the population level resulted in a decomposition of the sensor space into its recurring high-dimensional components. Such vector components could be applied to identify both past and novel sensory experiences and likely correspond to the fundamental haptic input features these neurons encode . In addition, we show that the cuneate learning architecture is robust to a wide range of intrinsic parameter settings due to the neuronal intrinsic dynamics. Therefore, the architecture is a potentially generic solution for forming versatile representations of the external world in different sensor systems.
大脑如何表征外部世界是神经科学中一个尚未解决的问题,这可能为脑电路运作提供基本见解,并为人工智能和机器人技术提供解决方案。楔束核的神经元构成了大脑中触觉感知的第一个界面。先前的研究表明,它们对触觉初级传入输入具有高度偏斜的突触权重分布,这表明它们的连接性受到学习的强烈影响。在这里,我们首先对楔束神经元的细胞内动力学和抑制性突触输入进行了表征,并对它们整合触觉感觉输入的过程进行了建模。然后,我们用来自有传感器的仿生指尖的输入取代了触觉输入,并对从各种感觉体验中出现的学习诱导表征进行了建模。该模型再现了楔束神经元中观察到的内在膜动力学和突触权重分布。就更高层次的模型特性而言,单个楔束神经元学会了识别特定的相关传感器集,这在群体水平上导致传感器空间分解为其反复出现的高维成分。这样的向量成分可用于识别过去和新的感觉体验,并且可能对应于这些神经元编码的基本触觉输入特征。此外,我们表明,由于神经元的内在动力学,楔束学习架构对广泛的内在参数设置具有鲁棒性。因此,该架构是在不同传感器系统中形成外部世界通用表征的潜在通用解决方案。