de Jong Tonke L, van de Berg Nick J, Tas Lisette, Moelker Adriaan, Dankelman Jenny, van den Dobbelsteen John J
BioMechanical Engineering Department, Delft University of Technology, Delft, the Netherlands,
Radiology & Nuclear Medicine Department, Erasmus MC, University Medical Center, Rotterdam, the Netherlands.
Med Devices (Auckl). 2018 Aug 3;11:259-265. doi: 10.2147/MDER.S160444. eCollection 2018.
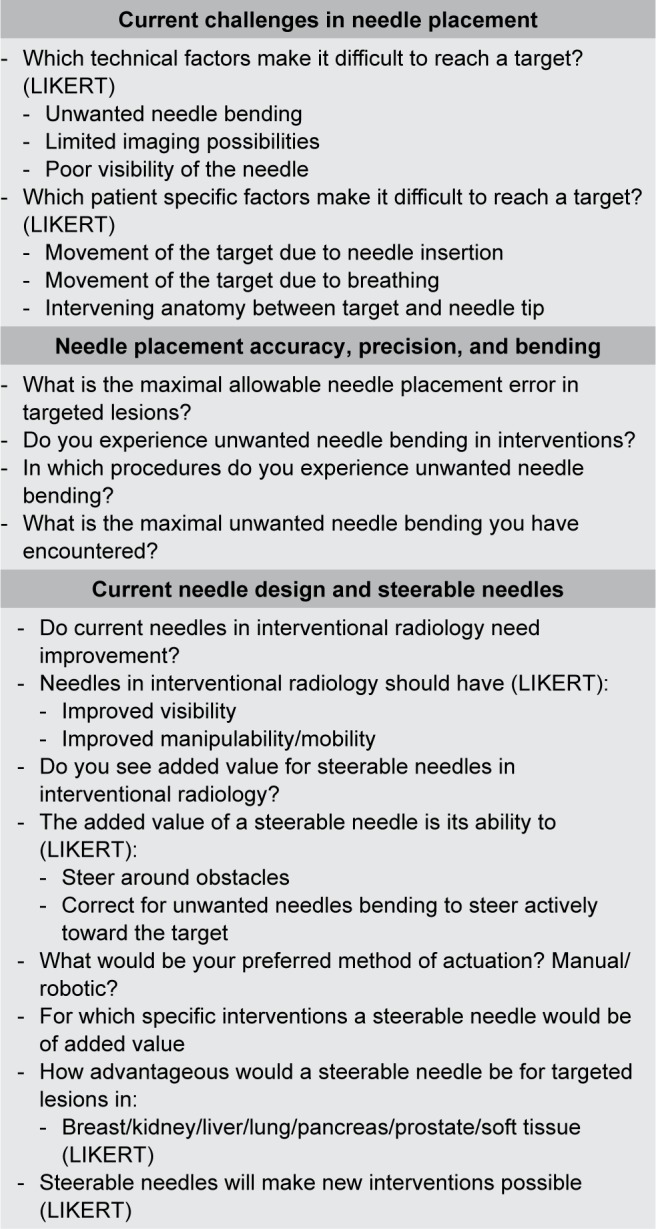
Accurate and precise needle placement is of utmost importance in interventional radiology. However, targeting can be challenging due to, eg, tissue motion and deformation. Steerable needles are a possible solution to overcome these challenges. The present work studied the clinical need for steerable needles. We aimed to answer three subquestions: 1) What are the current challenges in needle placement? 2) What are allowable needle placement errors? and 3) Do current needles need improvement and would steerable needles add clinical value?
A questionnaire was administered at the Annual Meeting of Cardiovascular and Interventional Radiology Society of Europe in 2016. In total, 153 respondents volunteered to fill out the survey, among them 125 (interventional) radiologists with experience in needle placement.
Steerable needles have the potential to add clinical value to radiologic interventions. The current data can be used as input for defining clinical design requirements for technical tools, such as steerable needles and navigation models, with the aim to improve needle placement in interventional radiology.
在介入放射学中,准确且精确的针放置至关重要。然而,由于例如组织运动和变形等原因,靶向操作可能具有挑战性。可操纵针是克服这些挑战的一种可能解决方案。本研究探讨了可操纵针对临床的需求。我们旨在回答三个子问题:1)针放置当前面临哪些挑战?2)允许的针放置误差是多少?3)当前的针是否需要改进,可操纵针是否会增加临床价值?
在2016年欧洲心血管和介入放射学会年会上进行了问卷调查。共有153名受访者自愿填写问卷,其中125名(介入)放射科医生有针放置经验。
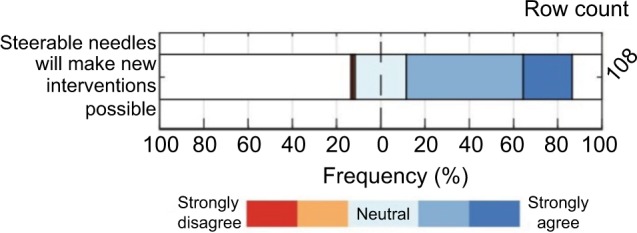
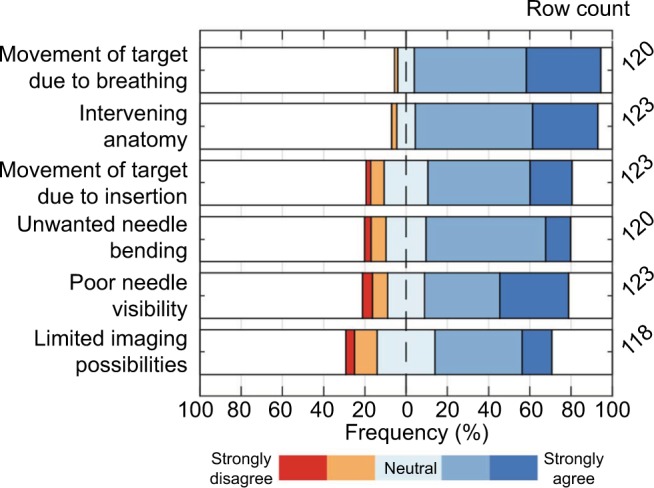
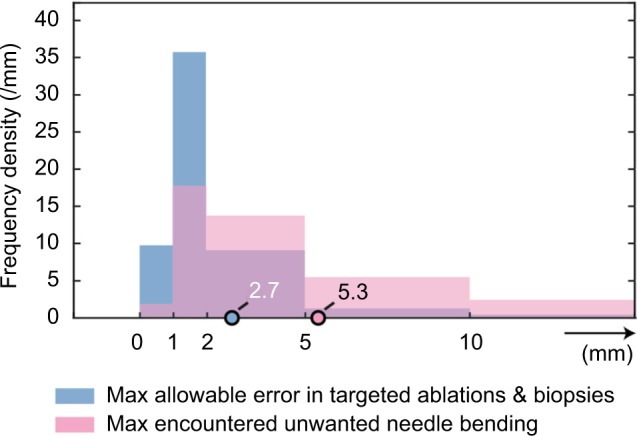
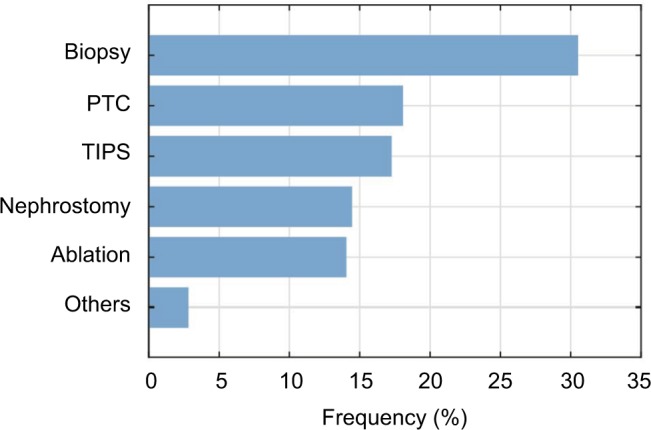
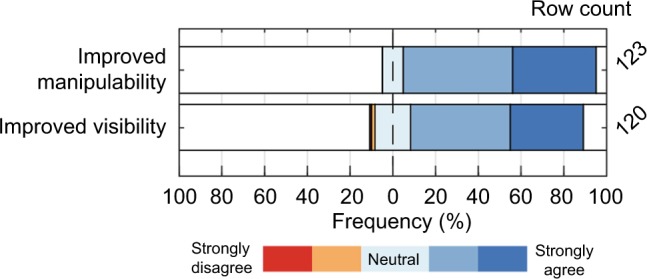
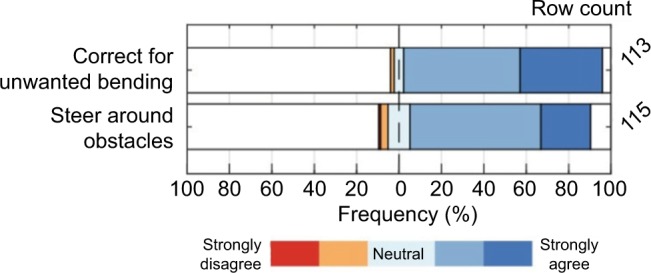
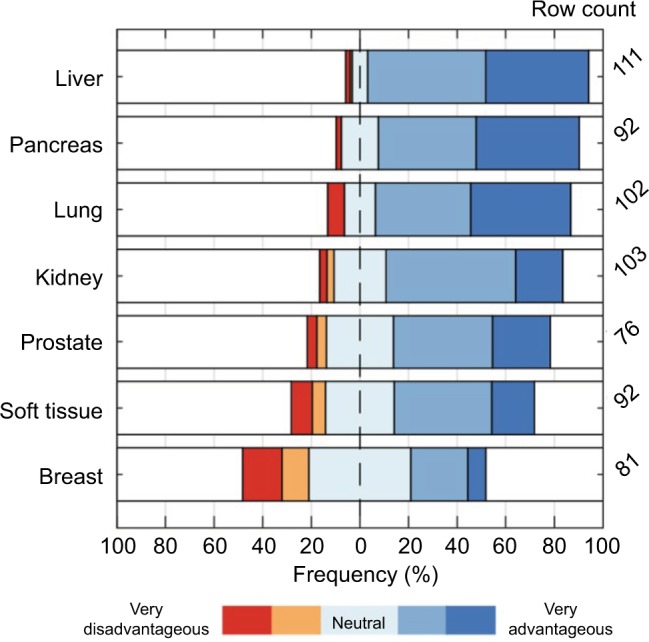
1)针放置当前面临的挑战包括患者特异性因素和技术因素。由于呼吸导致目标移动使得针放置最为困难(90%)。2)靶向病变中允许的针放置最大误差平均值为2.7毫米。大多数受访者(85%)在插入时遇到不必要的针弯曲。遇到的不必要针弯曲最大平均值为5.3毫米。3)95%的受访者认为介入放射学中的针需要改进,例如提高针的可视性和可操作性。93%的受访者认为可操纵针在当前干预中有附加价值。
可操纵针有可能为放射学干预增加临床价值。当前数据可作为定义技术工具(如可操纵针和导航模型)临床设计要求的输入,旨在改善介入放射学中的针放置。