Department of Industrial Engineering, University of Naples Federico II, Piazzale Tecchio 80, 80125 Naples, Italy.
Sensors (Basel). 2018 Oct 10;18(10):3391. doi: 10.3390/s18103391.
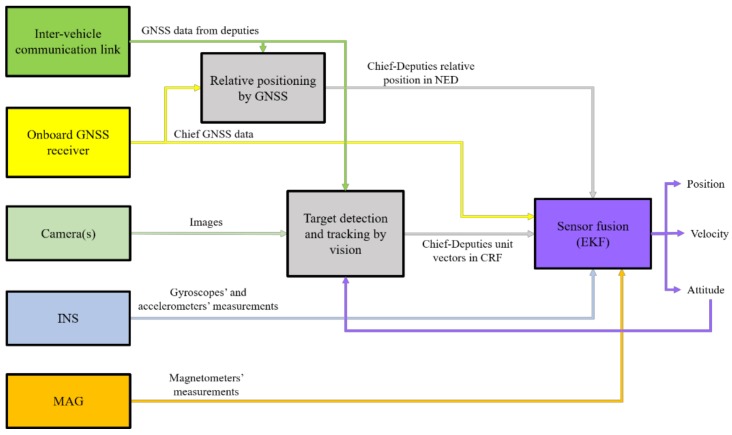
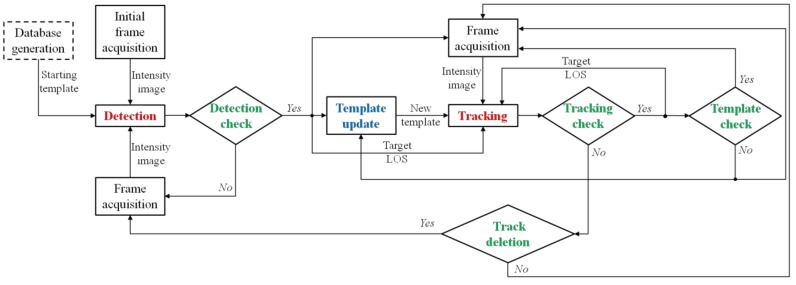
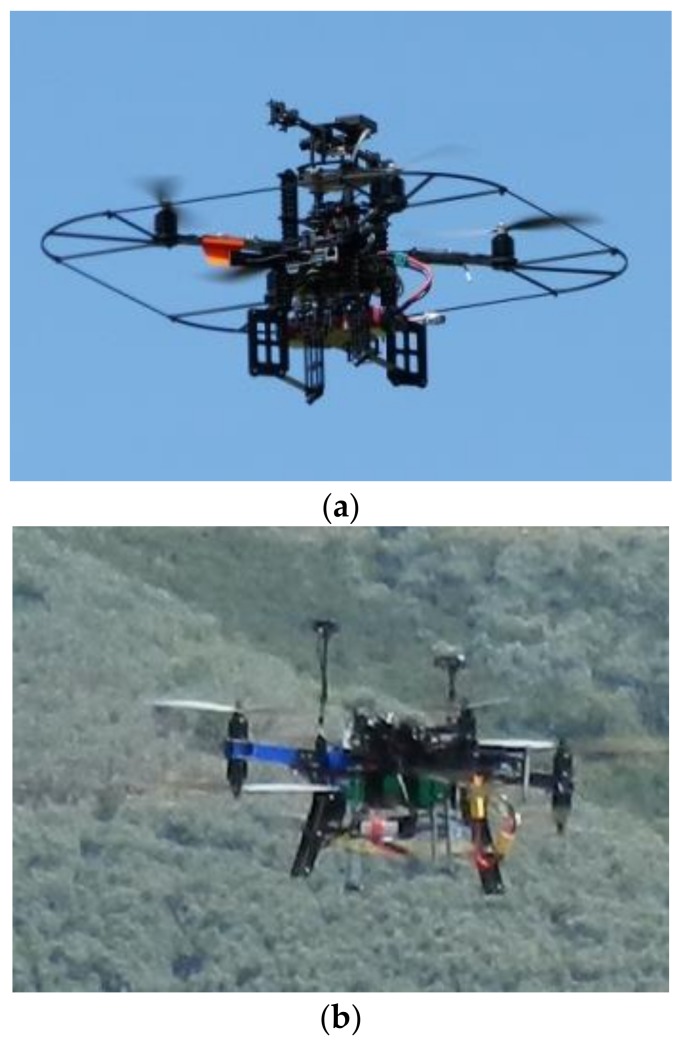
This paper presents a visual-based approach that allows an Unmanned Aerial Vehicle (UAV) to detect and track a cooperative flying vehicle autonomously using a monocular camera. The algorithms are based on template matching and morphological filtering, thus being able to operate within a wide range of relative distances (i.e., from a few meters up to several tens of meters), while ensuring robustness against variations of illumination conditions, target scale and background. Furthermore, the image processing chain takes full advantage of navigation hints (i.e., relative positioning and own-ship attitude estimates) to improve the computational efficiency and optimize the trade-off between correct detections, false alarms and missed detections. Clearly, the required exchange of information is enabled by the cooperative nature of the formation through a reliable inter-vehicle data-link. Performance assessment is carried out by exploiting flight data collected during an ad hoc experimental campaign. The proposed approach is a key building block of cooperative architectures designed to improve UAV navigation performance either under nominal GNSS coverage or in GNSS-challenging environments.
本文提出了一种基于视觉的方法,允许无人机 (UAV) 使用单目相机自主检测和跟踪合作飞行的车辆。该算法基于模板匹配和形态滤波,因此能够在相对距离较大的范围内(即从几米到几十米)运行,同时确保对光照条件、目标尺度和背景的变化具有鲁棒性。此外,图像处理链充分利用导航提示(即相对定位和自身船舶姿态估计)来提高计算效率,并优化正确检测、误报和漏检之间的权衡。显然,通过可靠的车际数据链路,编队的合作性质使所需的信息交换成为可能。通过利用在特定实验活动中收集的飞行数据来进行性能评估。所提出的方法是合作架构的关键构建块,旨在提高无人机在标称 GNSS 覆盖范围或 GNSS 挑战性环境下的导航性能。