AVIC Chengdu Aircraft Industrial (Group) Co., Ltd., Chengdu 610092, China.
Department of Mechanical Engineering, Qinghai University, Xining 810016, China.
Sensors (Basel). 2018 Oct 24;18(11):3608. doi: 10.3390/s18113608.
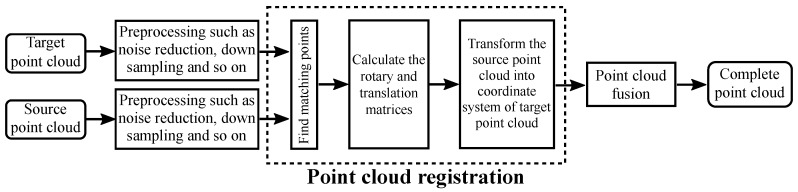
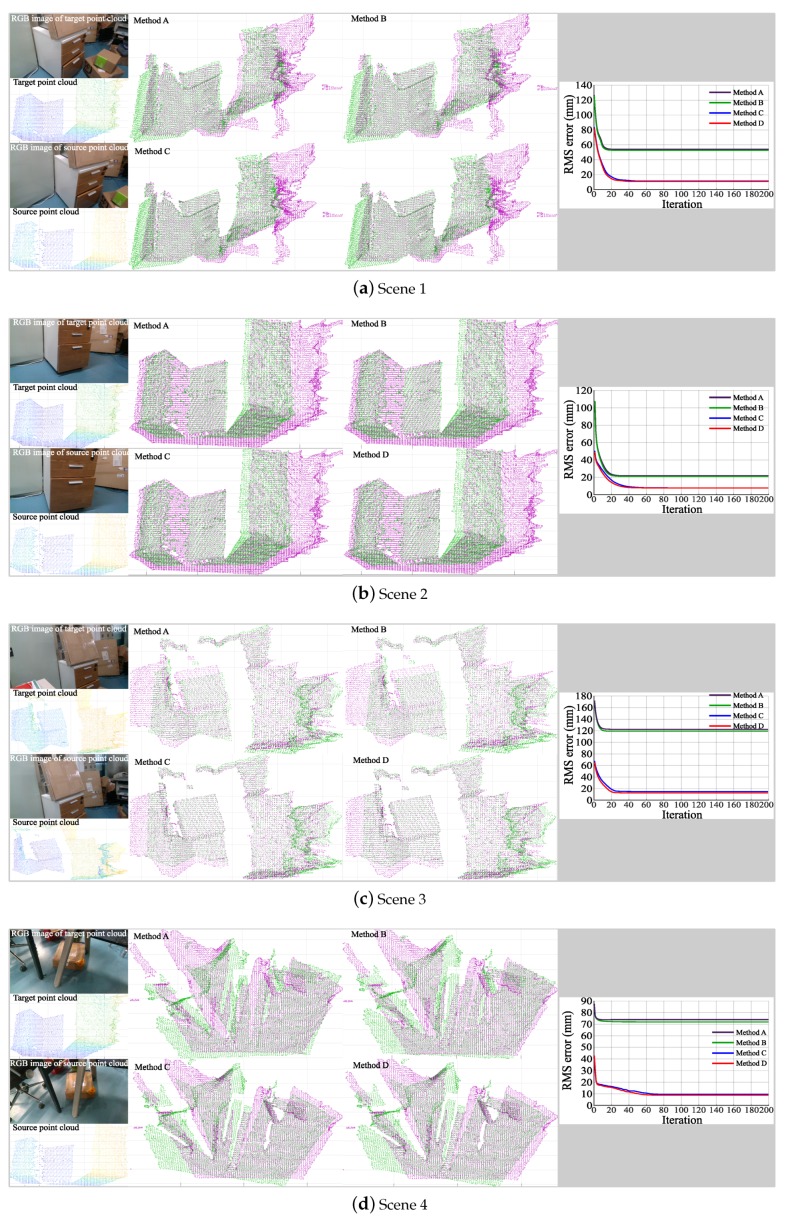
Point cloud registration plays a key role in three-dimensional scene reconstruction, and determines the effect of reconstruction. The iterative closest point algorithm is widely used for point cloud registration. To improve the accuracy of point cloud registration and the convergence speed of registration error, point pairs with smaller Euclidean distances are used as the points to be registered, and the depth measurement error model and weight function are analyzed. The measurement error is taken into account in the registration process. The experimental results of different indoor scenes demonstrate that the proposed method effectively improves the registration accuracy and the convergence speed of registration error.
点云配准在三维场景重建中起着关键作用,决定了重建的效果。迭代最近点算法被广泛应用于点云配准。为了提高点云配准的精度和配准误差的收敛速度,使用具有较小欧几里得距离的点对点进行配准,并对点云配准过程中的深度测量误差模型和权重函数进行了分析。实验结果表明,该方法在不同的室内场景下有效地提高了配准精度和配准误差的收敛速度。