College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China.
State Key Laboratory of Robotics and System, Harbin Institute of Technology (HIT), Harbin 150001, China.
Sensors (Basel). 2018 Oct 24;18(11):3611. doi: 10.3390/s18113611.
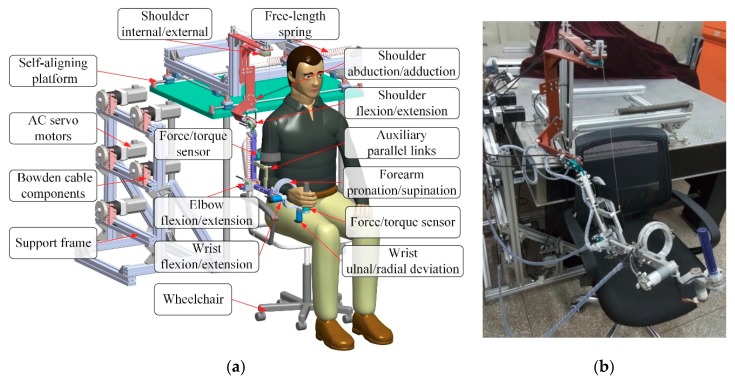
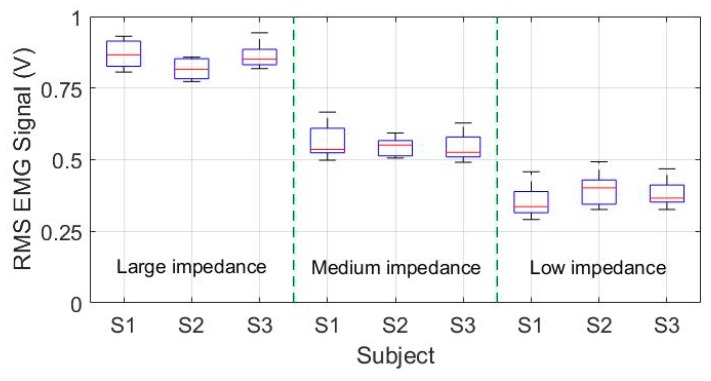
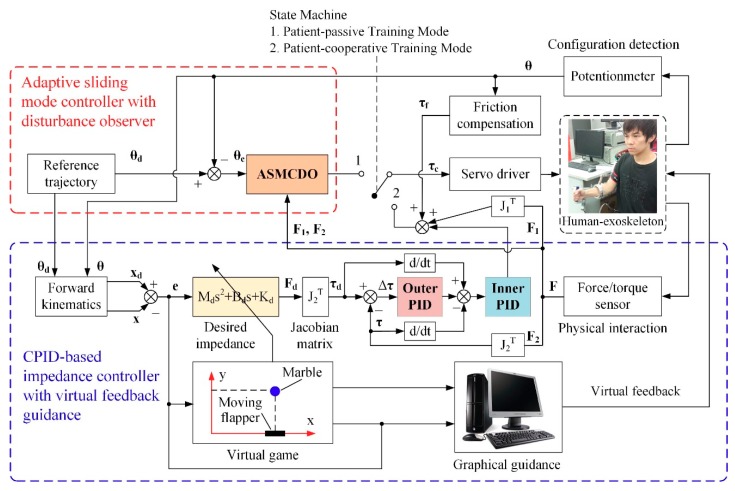
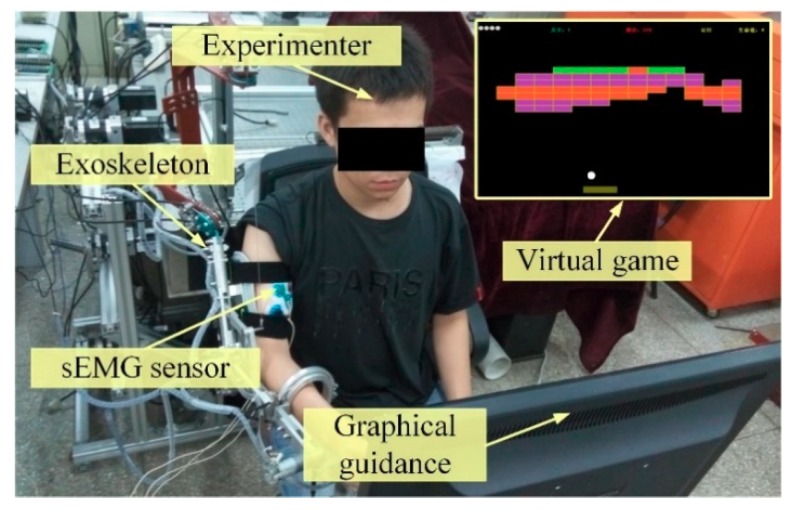
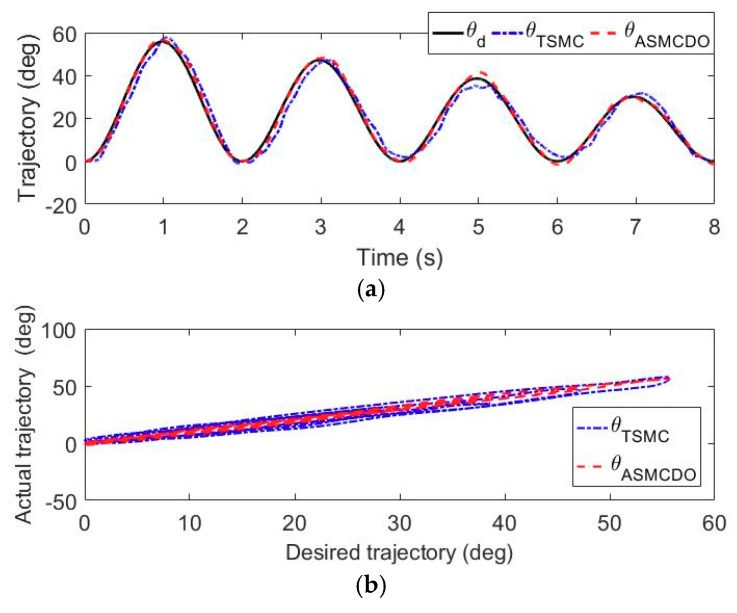
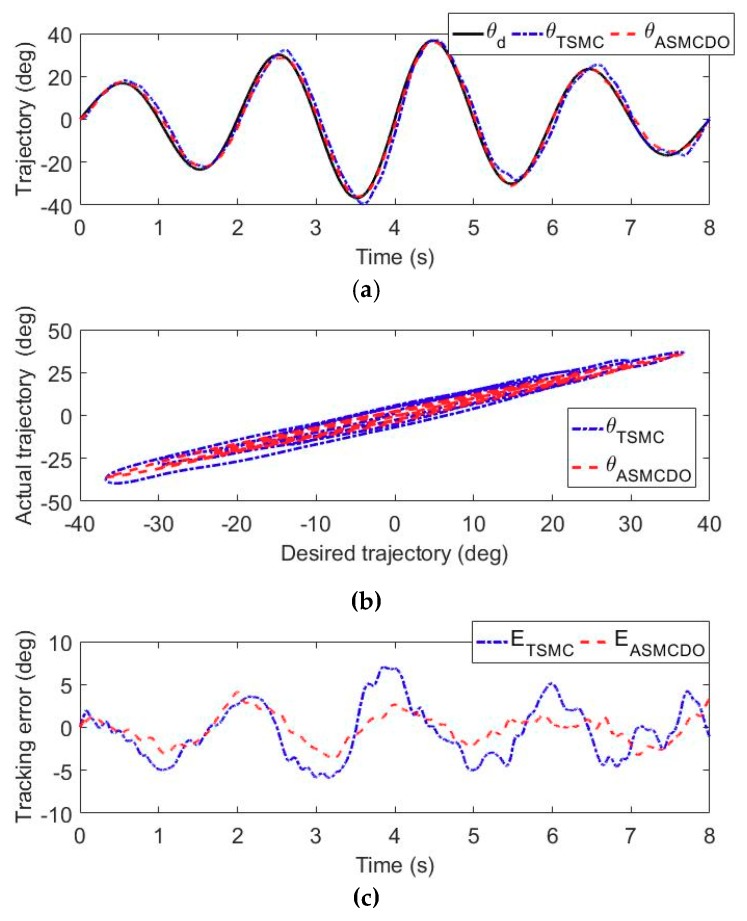
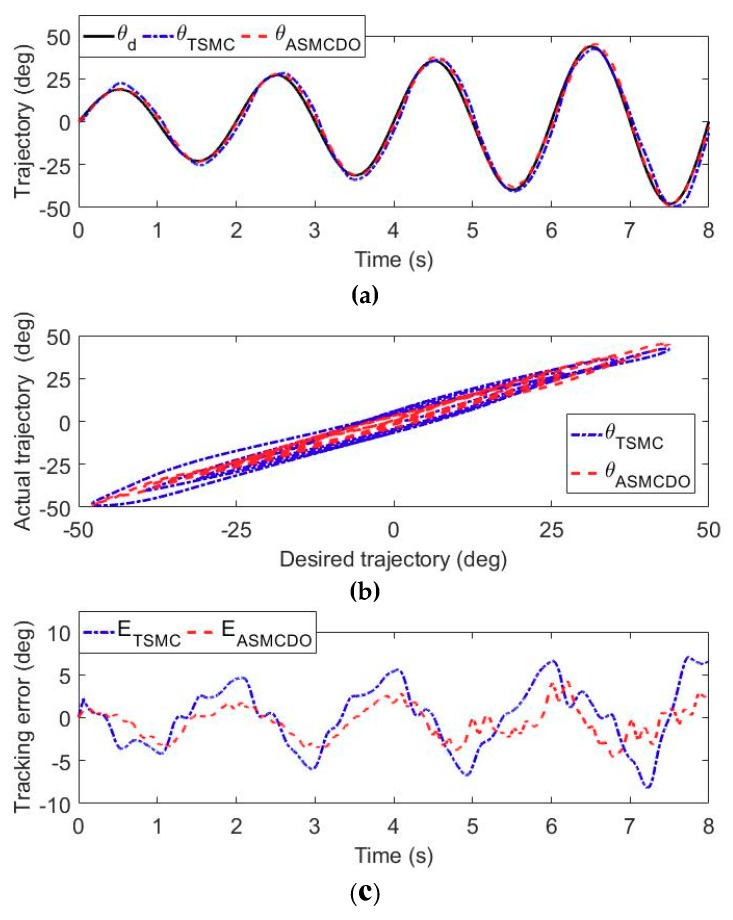
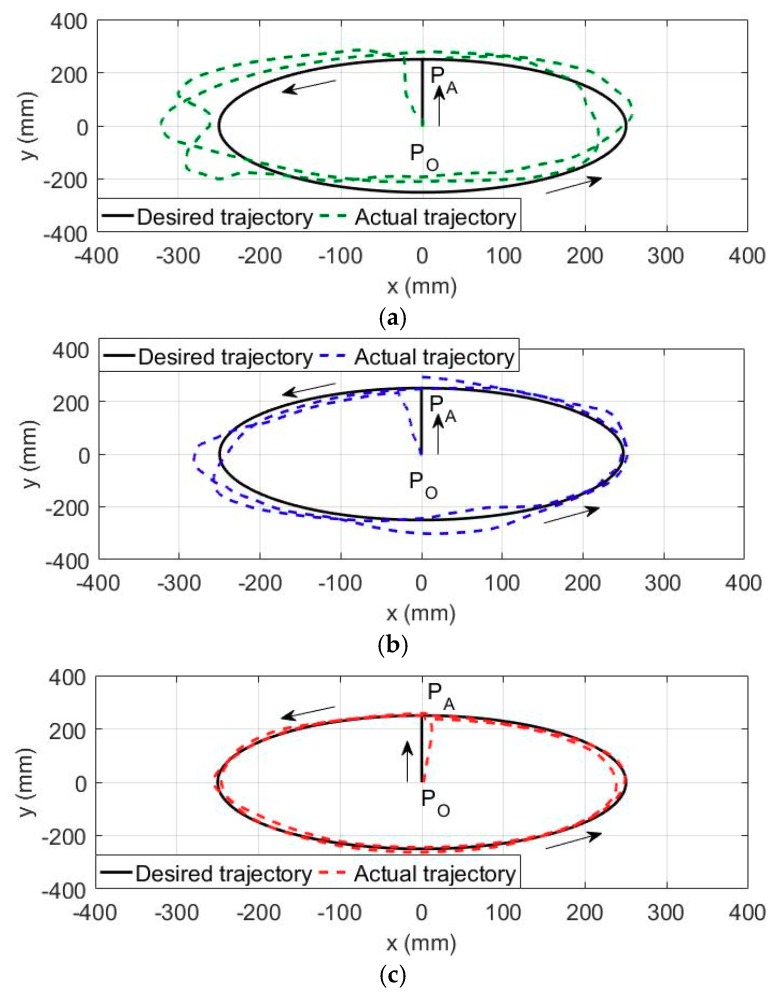
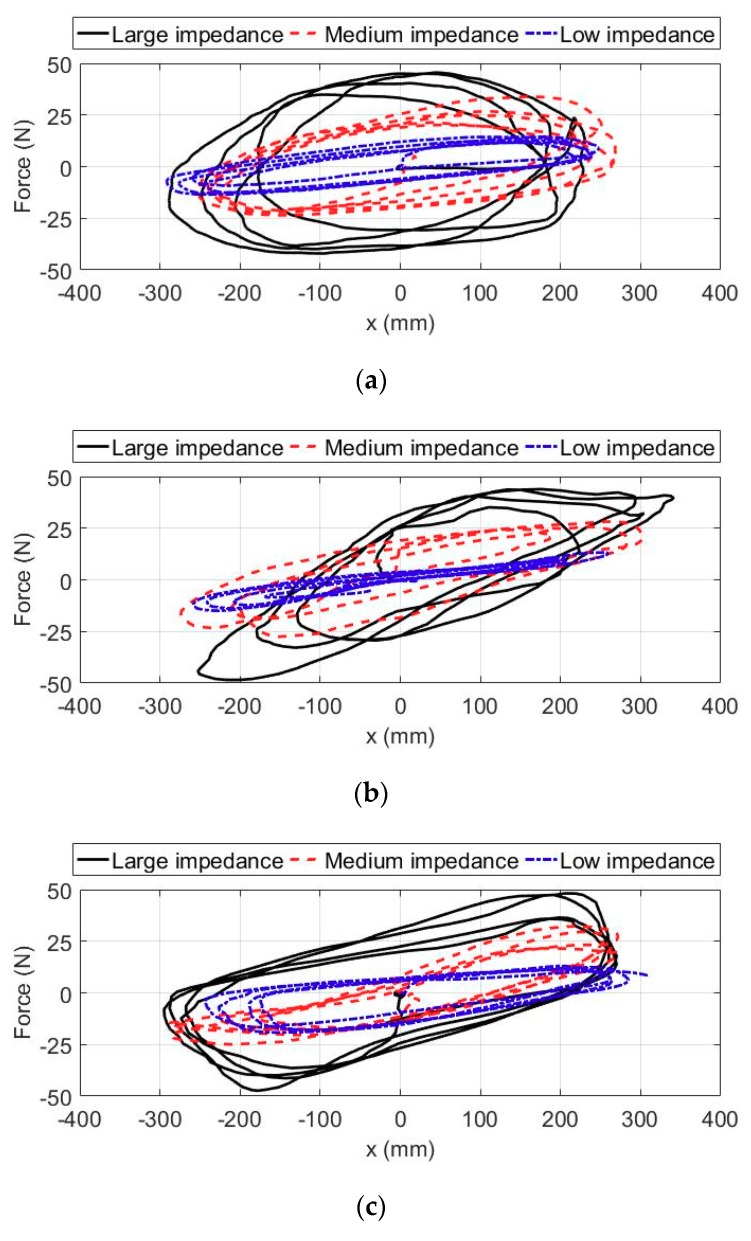
Robot-assisted training is a promising technology in clinical rehabilitation providing effective treatment to the patients with motor disability. In this paper, a multi-modal control strategy for a therapeutic upper limb exoskeleton is proposed to assist the disabled persons perform patient-passive training and patient-cooperative training. A comprehensive overview of the exoskeleton with seven actuated degrees of freedom is introduced. The dynamic modeling and parameters identification strategies of the human-robot interaction system are analyzed. Moreover, an adaptive sliding mode controller with disturbance observer (ASMCDO) is developed to ensure the position control accuracy in patient-passive training. A cascade-proportional-integral-derivative (CPID)-based impedance controller with graphical game-like interface is designed to improve interaction compliance and motivate the active participation of patients in patient-cooperative training. Three typical experiments are conducted to verify the feasibility of the proposed control strategy, including the trajectory tracking experiments, the trajectory tracking experiments with impedance adjustment, and the intention-based training experiments. The experimental results suggest that the tracking error of ASMCDO controller is smaller than that of terminal sliding mode controller. By optimally changing the impedance parameters of CPID-based impedance controller, the training intensity can be adjusted to meet the requirement of different patients.
机器人辅助训练是临床康复领域中一种很有前途的技术,可为运动功能障碍患者提供有效的治疗。本文提出了一种用于治疗性上肢外骨骼的多模态控制策略,以辅助残疾人进行患者被动训练和患者协作训练。本文全面介绍了具有七个驱动自由度的外骨骼。分析了人机交互系统的动力学建模和参数辨识策略。此外,还开发了具有干扰观测器的自适应滑模控制器(ASMCDO),以确保在患者被动训练中位置控制精度。设计了基于串级比例积分微分(CPID)的阻抗控制器和图形游戏界面,以提高交互顺应性,并激励患者在患者协作训练中积极参与。进行了三个典型实验来验证所提出的控制策略的可行性,包括轨迹跟踪实验、带阻抗调整的轨迹跟踪实验和基于意图的训练实验。实验结果表明,ASMCDO 控制器的跟踪误差小于末端滑模控制器的跟踪误差。通过优化 CPID 阻抗控制器的阻抗参数,可以调整训练强度,以满足不同患者的需求。