Intelligent Robotics Institute, School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China.
Key Laboratory of Biomimetic Robots and Systems, Ministry of Education, Beijing 100081, China.
Sensors (Basel). 2018 Oct 22;18(10):3589. doi: 10.3390/s18103589.
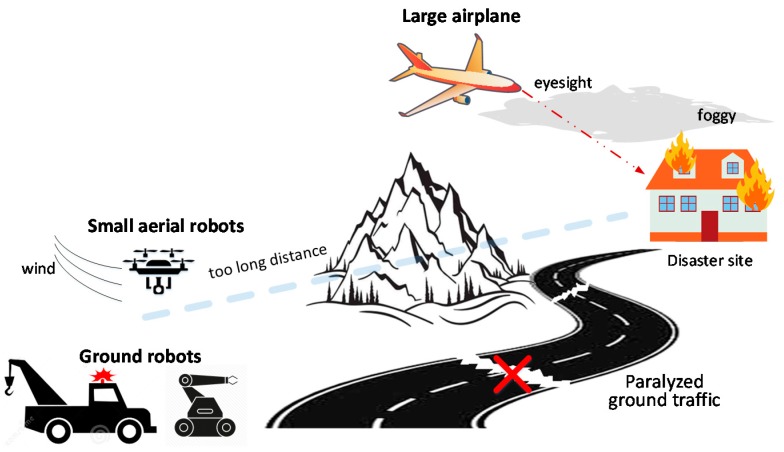
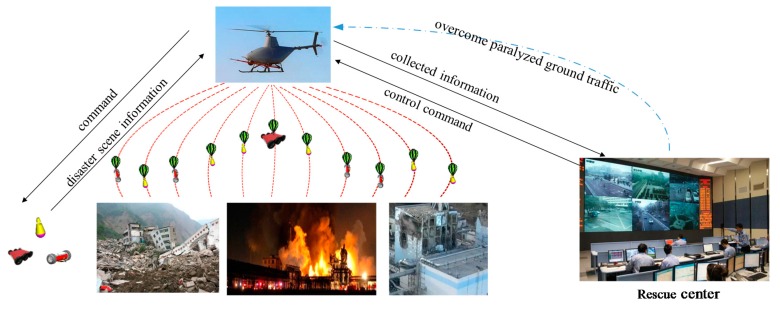
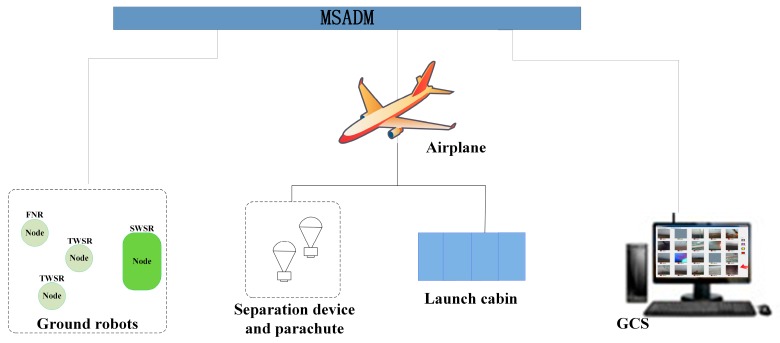
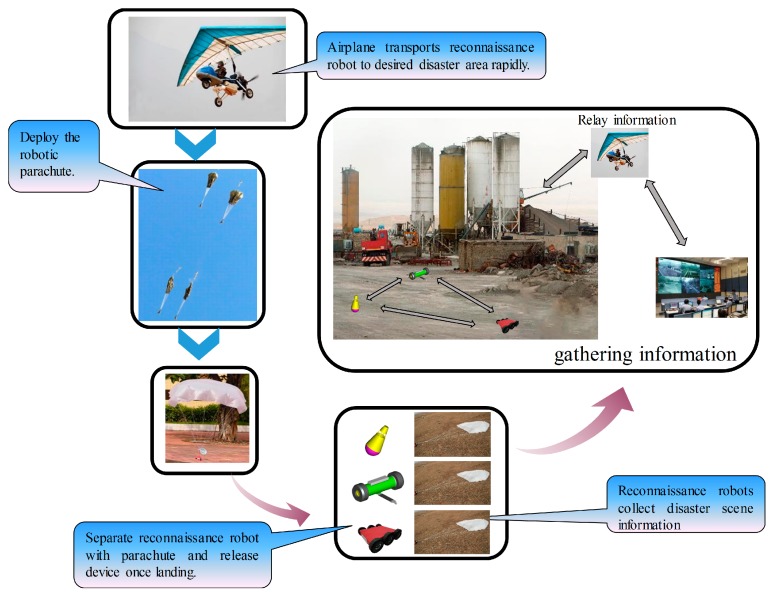
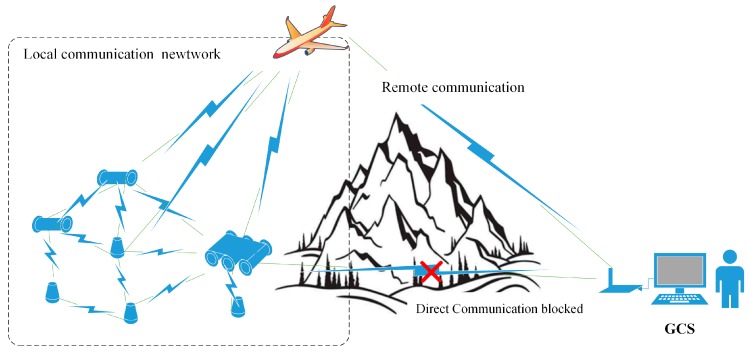
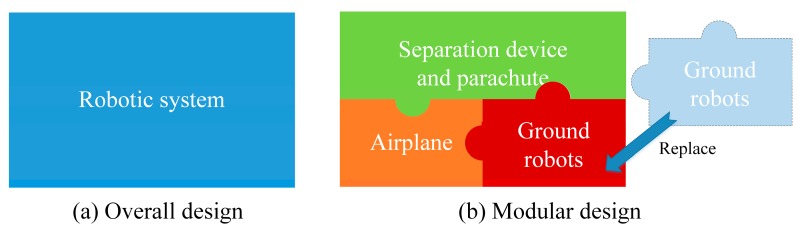
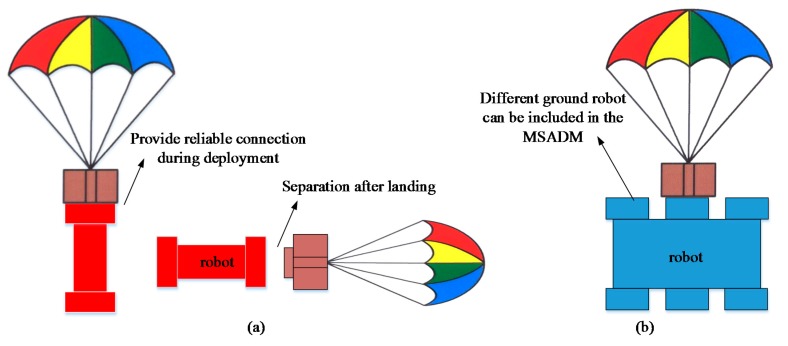
This paper presents a novel sensing mode for using mobile robots to collect disaster ground information when the ground traffic from the rescue center to disaster site is disrupted. Traditional sensing modes which use aerial robots or ground robots independently either have limited ability to access disaster site or are only able to provide a bird's eye view of the disaster site. To illustrate the proposed sensing mode, the authors have developed a Multi-robot System with Air Dispersal Mode (MSADM) by combining the unimpeded path of aerial robots with the detailed view of ground robots. In the MSADM, an airplane carries some minimal reconnaissance ground robots to overcome the paralyzed traffic problem and deploys them on the ground to collect detailed scene information using parachutes and separation device modules. In addition, the airplane cruises in the sky and relays the control and reported information between the ground robots and the human operator. This means that the proposed sensing mode is able to provide more reliable communication performance when there are obstacles between the human operators and the ground robots. Additionally, the proposed sensing mode can easily make use of different kinds of ground robots, as long as they have a compatible interface with the separation device. Finally, an experimental demonstration of the MSADM is presented to show the effectiveness of the proposed sensing mode.
本文提出了一种新的传感模式,用于在从救援中心到灾难现场的地面交通中断时,使用移动机器人来收集灾难现场的信息。传统的传感模式,无论是使用空中机器人还是地面机器人独立进行,要么进入灾难现场的能力有限,要么只能提供灾难现场的鸟瞰图。为了说明所提出的传感模式,作者通过将空中机器人的无障碍路径与地面机器人的详细视图相结合,开发了一种具有空中散布模式的多机器人系统(MSADM)。在 MSADM 中,飞机携带一些最小的侦察地面机器人来克服瘫痪的交通问题,并使用降落伞和分离装置模块将它们部署在地面上以收集详细的场景信息。此外,飞机在天空中巡航,并在地面机器人和操作人员之间中继控制和报告信息。这意味着,在所提出的传感模式中,当操作人员和地面机器人之间存在障碍物时,能够提供更可靠的通信性能。此外,所提出的传感模式可以轻松利用不同种类的地面机器人,只要它们与分离装置具有兼容的接口即可。最后,展示了 MSADM 的实验演示,以展示所提出的传感模式的有效性。