School of Information and Communication Engineering, Beijing University of Posts and Telecommunication, Beijing 100876, China.
Beijing Key Laboratory of Network System Architecture and Convergence, Beijing University of Posts and Telecommunications, Beijing 100876, China.
Sensors (Basel). 2018 Nov 15;18(11):3951. doi: 10.3390/s18113951.
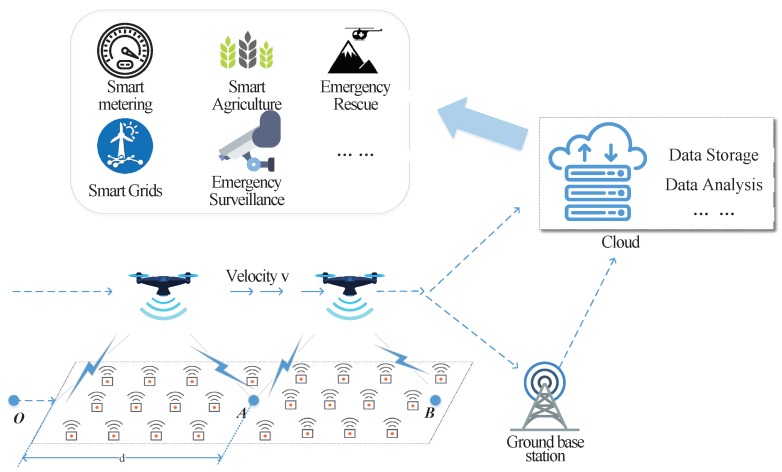
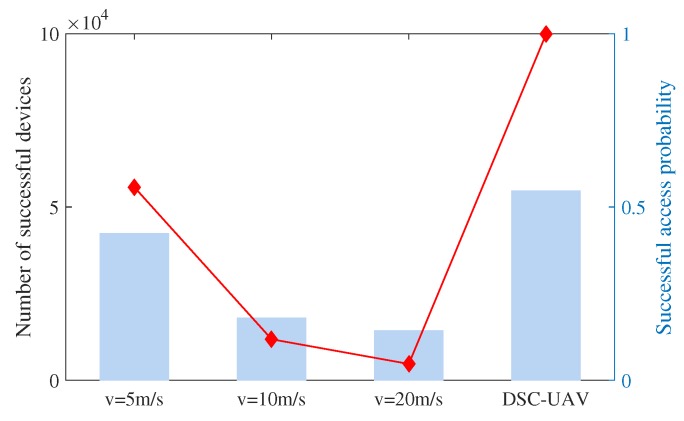
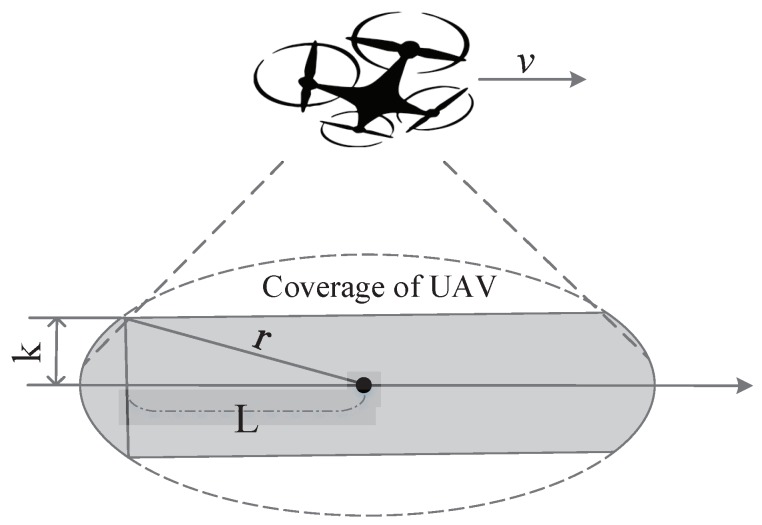
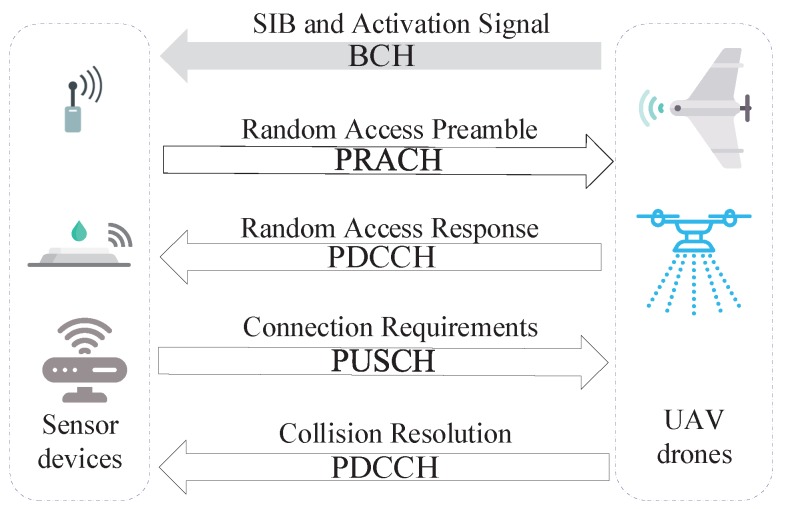
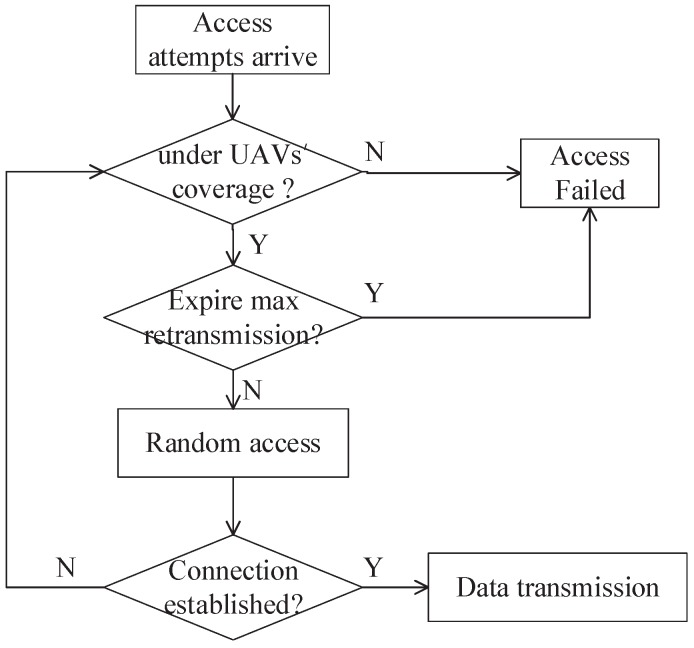
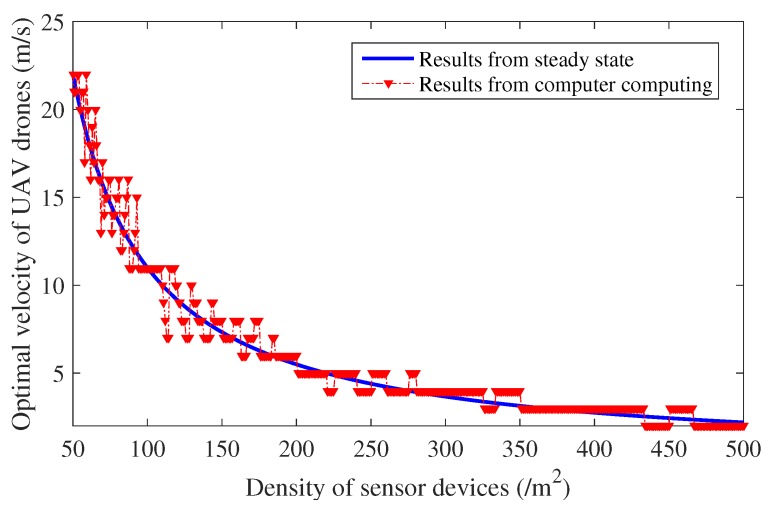
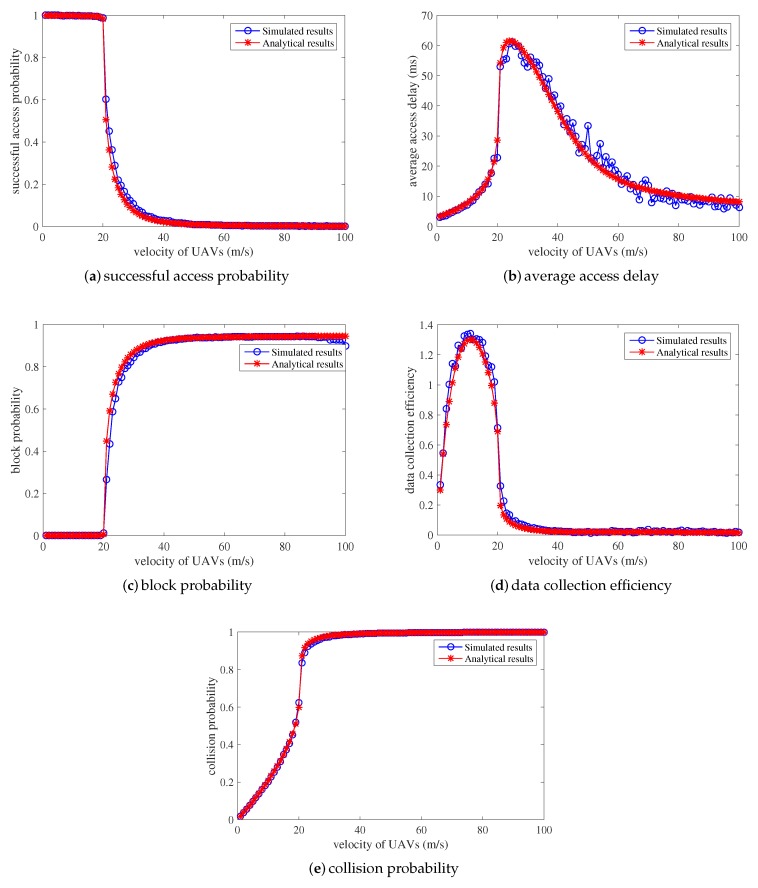
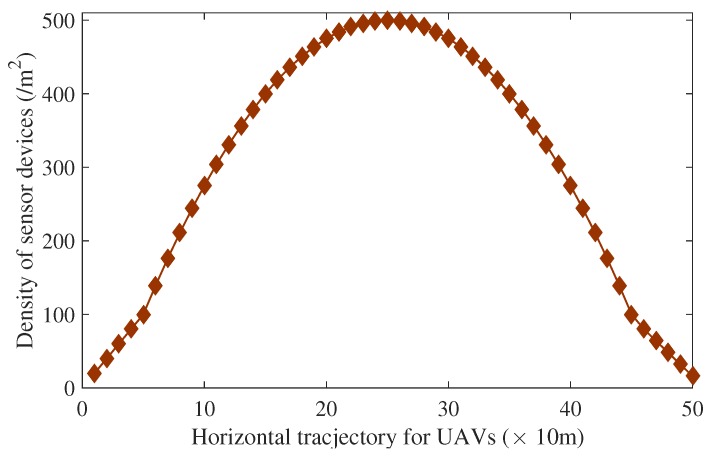
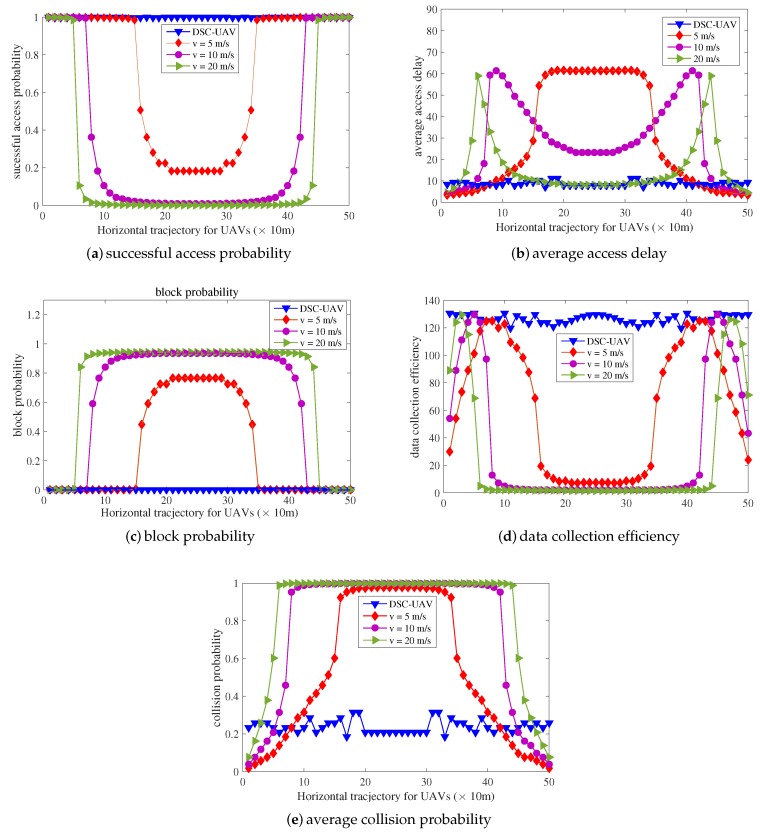
With the new advancements in flight control and integrated circuit (IC) technology, unmanned aerial vehicles (UAVs) have been widely used in various applications. One of the typical application scenarios is data collection for large-scale and remote sensor devices in the Internet of things (IoT). However, due to the characteristics of massive connections, access collisions in the MAC layer lead to high power consumption for both sensor devices and UAVs, and low efficiency for the data collection. In this paper, a dynamic speed control algorithm for UAVs (DSC-UAV) is proposed to maximize the data collection efficiency, while alleviating the access congestion for the UAV-based base stations. With a cellular network considered for support of the communication between sensor devices and drones, the connection establishment process was analyzed and modeled in detail. In addition, the data collection efficiency is also defined and derived. Based on the analytical models, optimal speed under different sensor device densities is obtained and verified. UAVs can dynamically adjust the speed according to the sensor device density under their coverages to keep high data collection efficiency. Finally, simulation results are also conducted to verify the accuracy of the proposed analytical models and show that the DSC-UAV outperforms others with the highest data collection efficiency, while maintaining a high successful access probability, low average access delay, low block probability, and low collision probability.
随着飞行控制和集成电路 (IC) 技术的新进展,无人机 (UAV) 在各种应用中得到了广泛应用。其中一个典型的应用场景是物联网 (IoT) 中大规模和远程传感器设备的数据收集。然而,由于大规模连接的特点,MAC 层的接入冲突导致传感器设备和无人机的功耗高,数据采集效率低。本文提出了一种用于无人机的动态速度控制算法 (DSC-UAV),以最大限度地提高数据采集效率,同时缓解基于无人机的基站的接入拥塞。考虑使用蜂窝网络来支持传感器设备和无人机之间的通信,详细分析和建模了连接建立过程。此外,还定义和推导了数据采集效率。基于分析模型,得出并验证了不同传感器设备密度下的最优速度。无人机可以根据其覆盖范围内的传感器设备密度动态调整速度,以保持高数据采集效率。最后,还进行了仿真结果以验证所提出的分析模型的准确性,并表明 DSC-UAV 具有最高的数据采集效率,同时保持高成功接入概率、低平均接入延迟、低阻塞概率和低碰撞概率。