Leal-Junior Arnaldo, Theodosiou Antreas, Díaz Camilo, Marques Carlos, Pontes Maria José, Kalli Kyriacos, Frizera-Neto Anselmo
Graduate Program of Electrical Engineering, Federal University of Espírito Santo, Vitória 29075-910, Brazil.
Photonics and Optical Sensing Research Laboratory, Cyprus University of Technology, 3036 Limassol, Cyprus.
Materials (Basel). 2018 Nov 16;11(11):2305. doi: 10.3390/ma11112305.
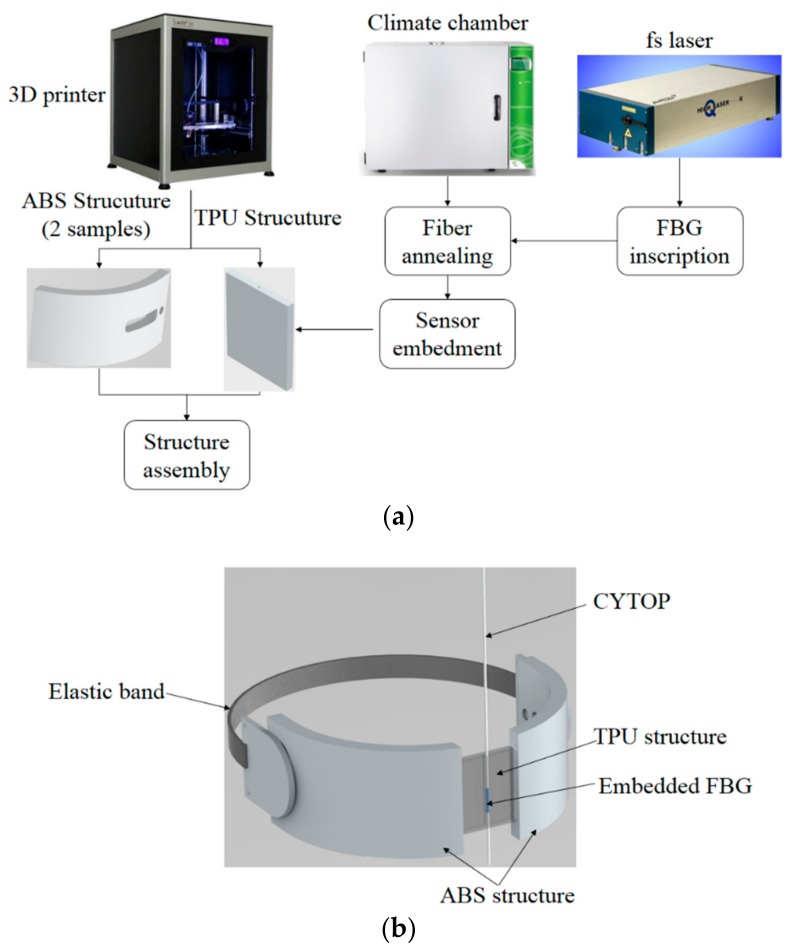
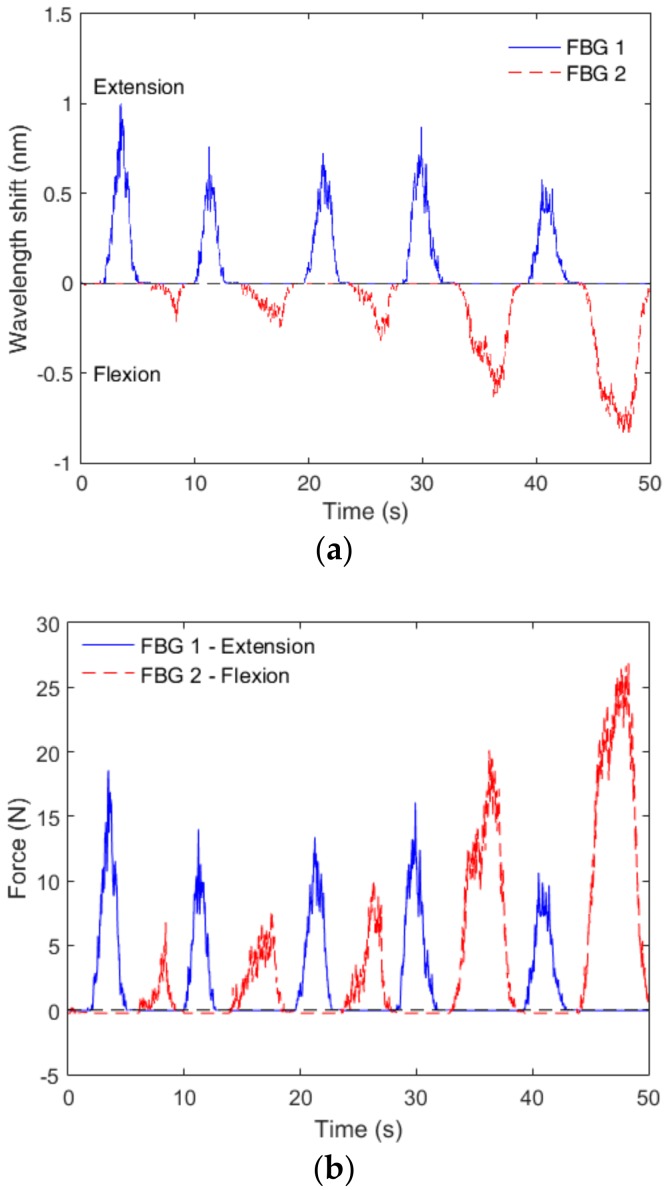
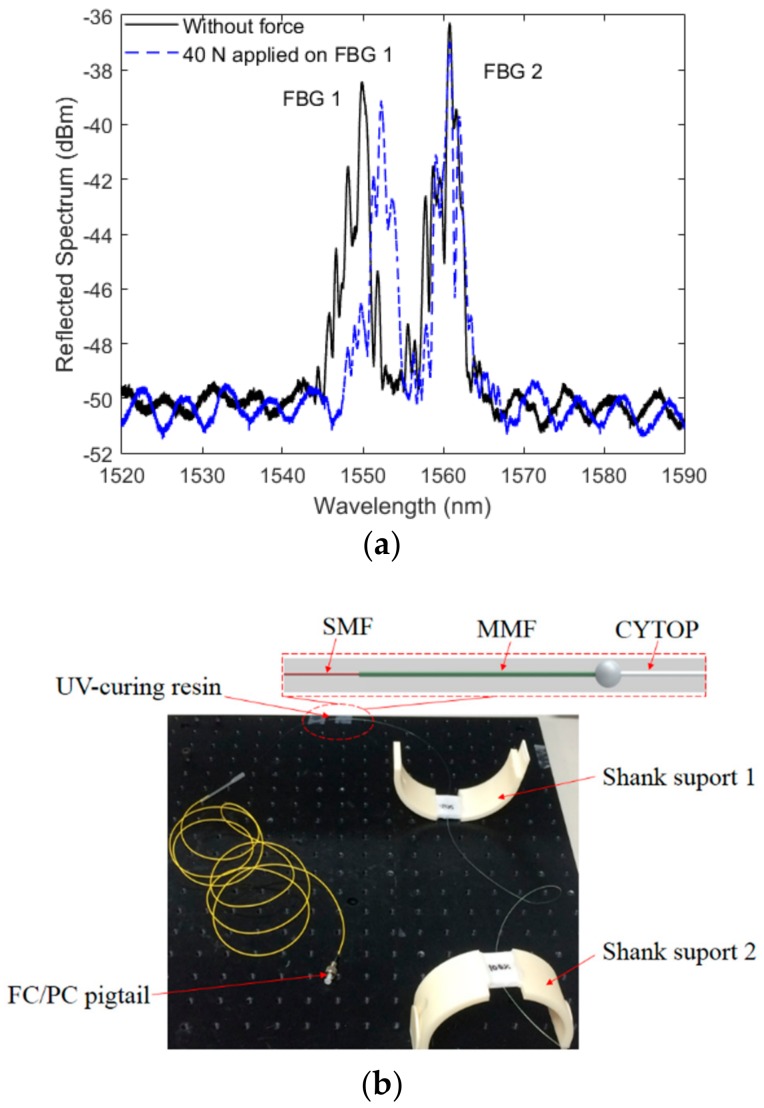
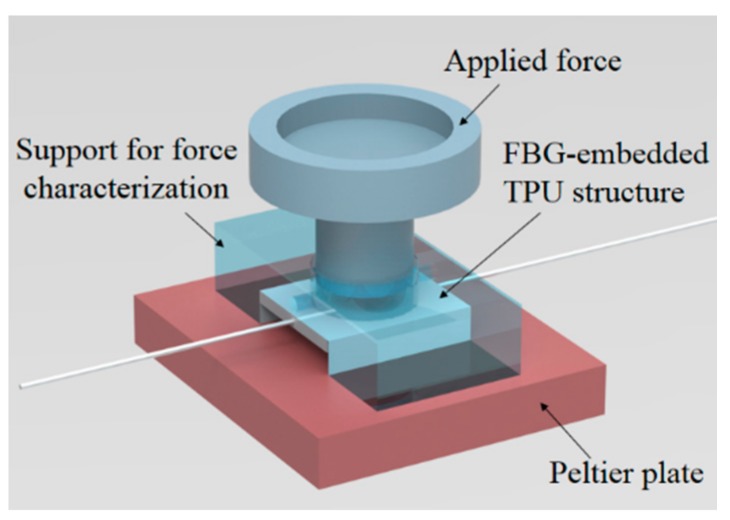
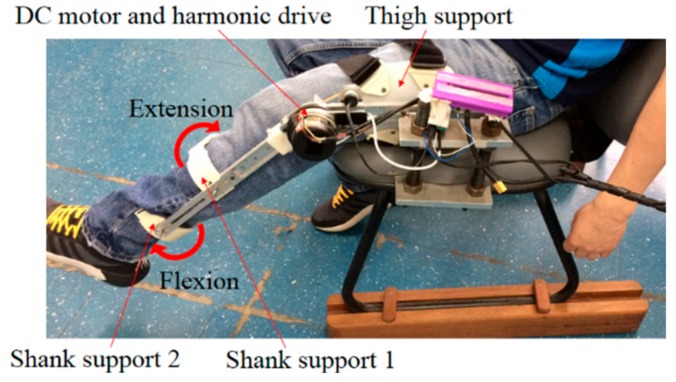
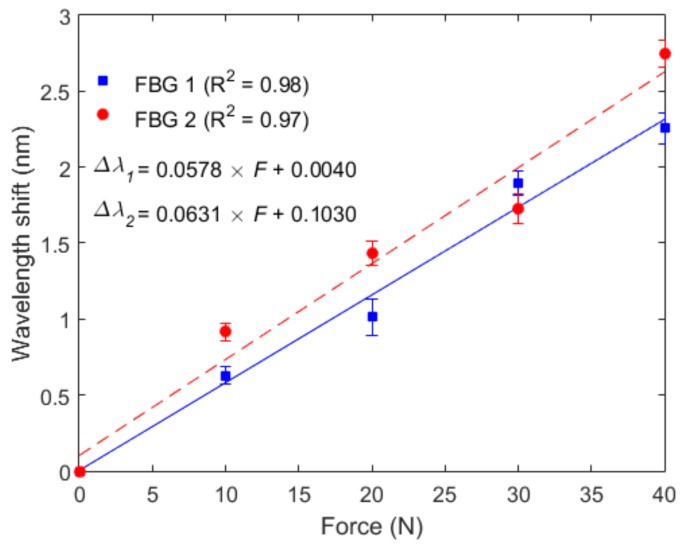
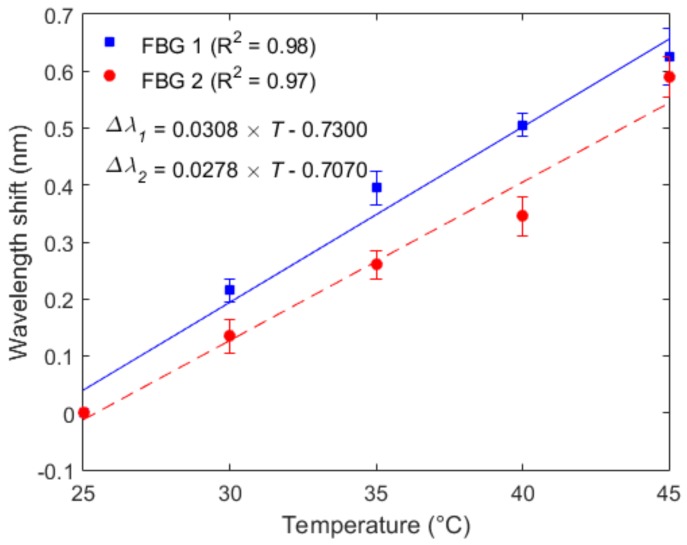
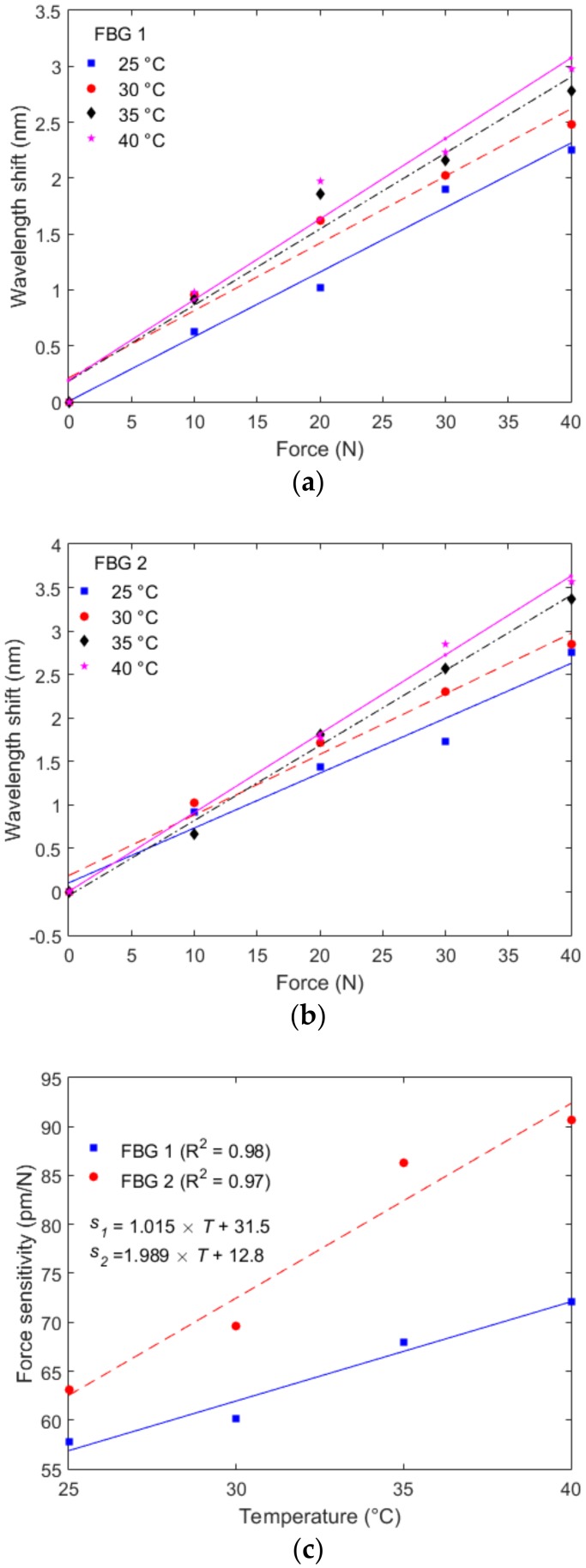
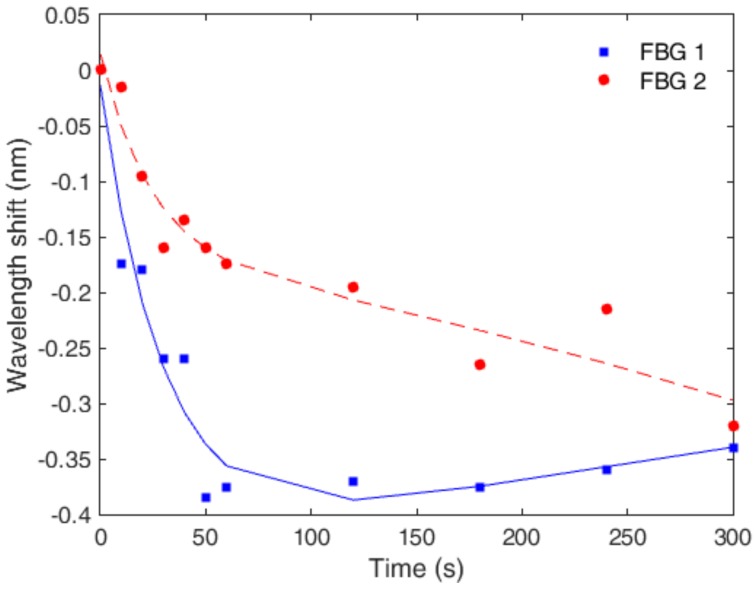
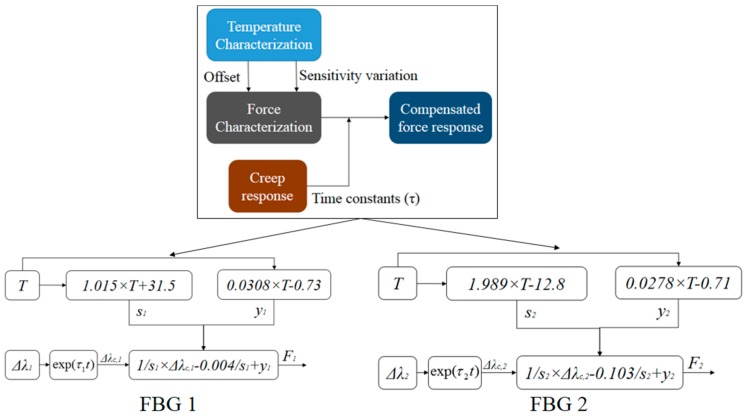
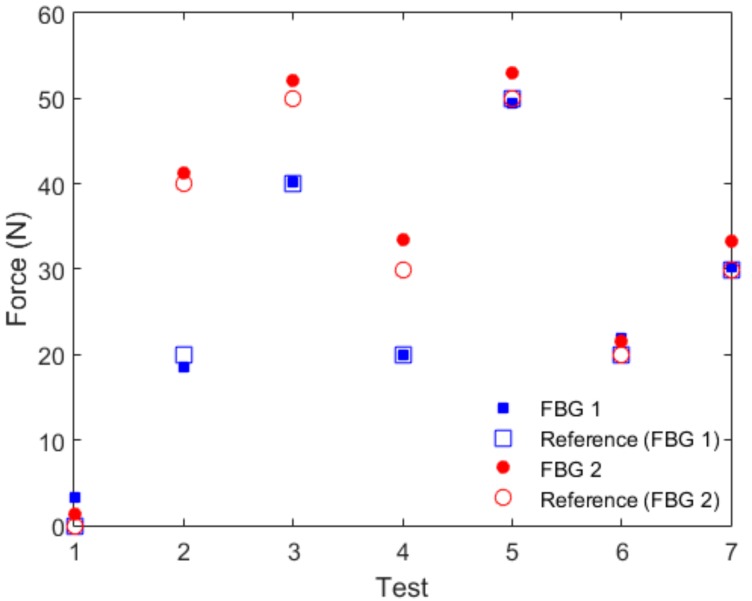
We developed a flexible support with embedded polymer optical fiber (POF) sensors for the assessment of human⁻robot interaction forces. The supports were fabricated with a three-dimensional (3D) printer, where an acrylonitrile butadiene styrene (ABS) rigid structure was used in the region of the support in which the exoskeleton was attached, whereas a thermoplastic polyurethane (TPU) flexible structure was printed in the region where the users placed their legs. In addition, fiber Bragg gratings (FBGs), inscribed in low-loss, cyclic, transparent, optical polymer (CYTOP) using the direct-write, plane-by-plane femtosecond laser inscription method, were embedded in the TPU structure. In this case, a 2-FBG array was embedded in two supports for human⁻robot interaction force assessment at two points on the users' legs. Both FBG sensors were characterized with respect to temperature and force; additionally, the creep response of the polymer, where temperature influences the force sensitivity, was analyzed. Following the characterization, a compensation method for the creep and temperature influence was derived, showing relative errors below 4.5%. Such errors were lower than the ones obtained with similar sensors in previously published works. The instrumented support was attached to an exoskeleton for knee rehabilitation exercises, where the human⁻robot interaction forces were measured in flexion and extension cycles.
我们开发了一种带有嵌入式聚合物光纤(POF)传感器的柔性支撑装置,用于评估人机交互力。这些支撑装置是用三维(3D)打印机制造的,在支撑装置中与外骨骼相连的区域使用丙烯腈丁二烯苯乙烯(ABS)刚性结构,而在用户放置腿部的区域打印热塑性聚氨酯(TPU)柔性结构。此外,使用逐平面飞秒激光直写方法在低损耗、可循环、透明的光学聚合物(CYTOP)中写入的光纤布拉格光栅(FBG)被嵌入到TPU结构中。在这种情况下,一个双FBG阵列被嵌入到两个支撑装置中,用于在用户腿部的两个点评估人机交互力。对两个FBG传感器进行了温度和力的特性表征;此外,还分析了聚合物的蠕变响应,其中温度会影响力灵敏度。在表征之后,得出了一种针对蠕变和温度影响的补偿方法,相对误差低于4.5%。这些误差低于先前发表的作品中使用类似传感器所获得的误差。该仪器化支撑装置被连接到一个用于膝关节康复锻炼的外骨骼上,在屈伸循环中测量人机交互力。