Department of Medicine and Surgery, Neuroscience Unit, University of Parma, 43125 Parma, Italy;
Department of Medicine and Surgery, Neuroscience Unit, University of Parma, 43125 Parma, Italy.
Proc Natl Acad Sci U S A. 2019 Feb 12;116(7):2691-2700. doi: 10.1073/pnas.1810890116. Epub 2019 Jan 29.
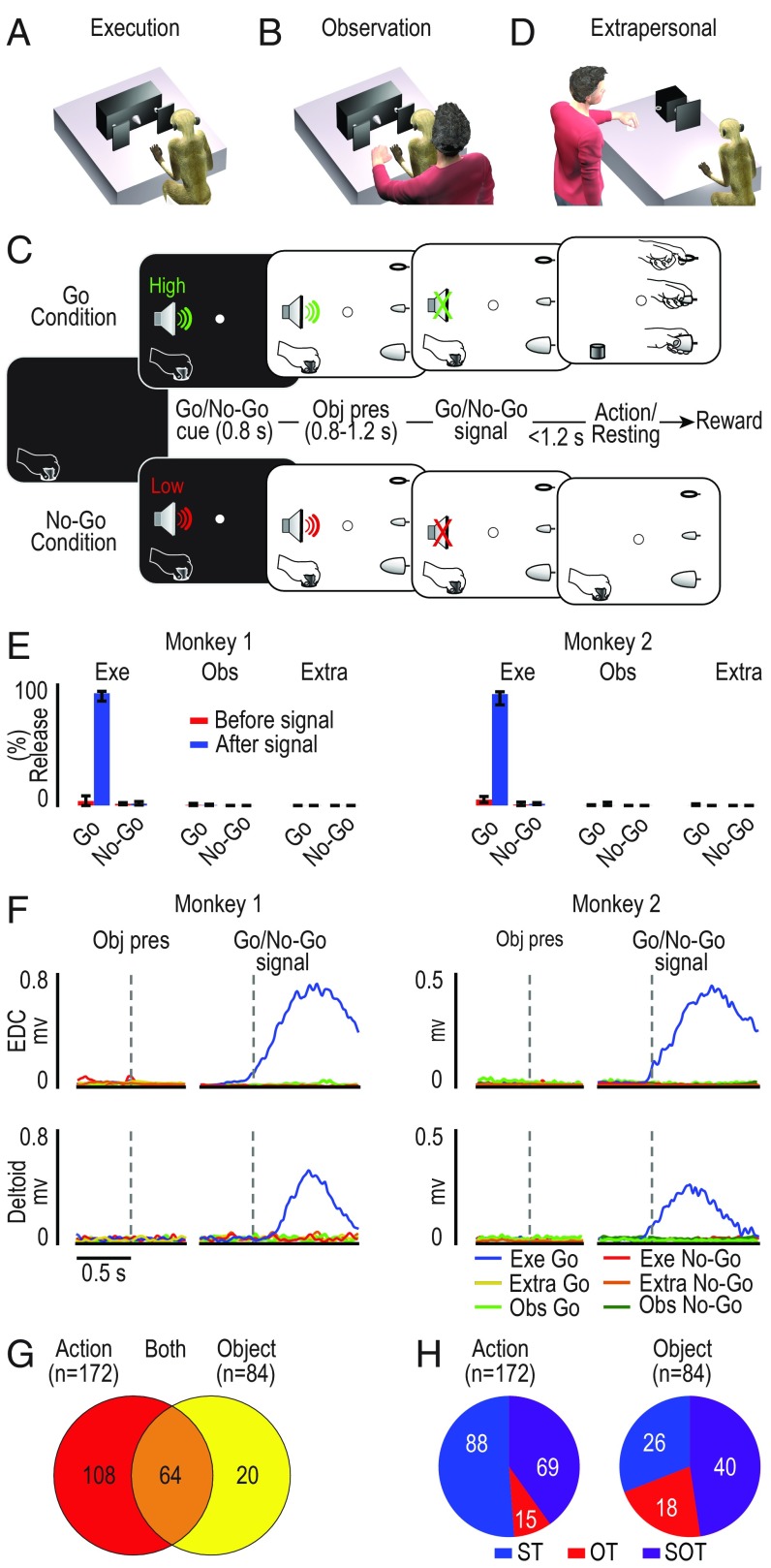
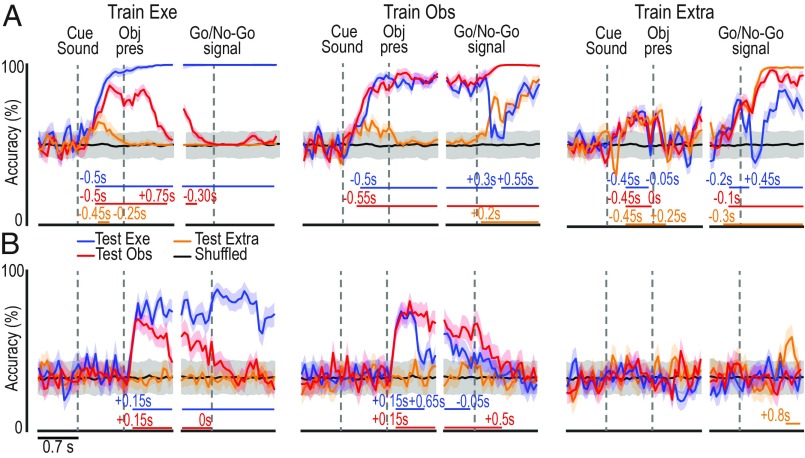
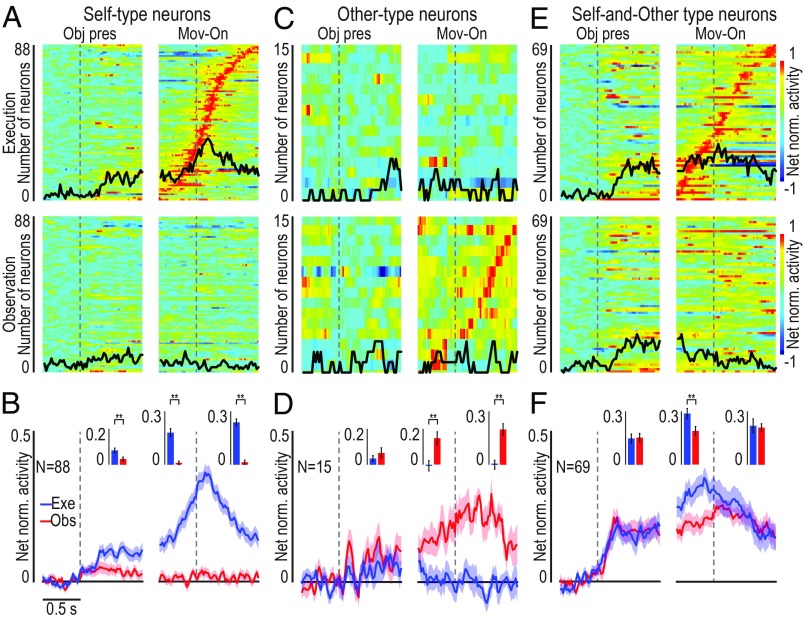
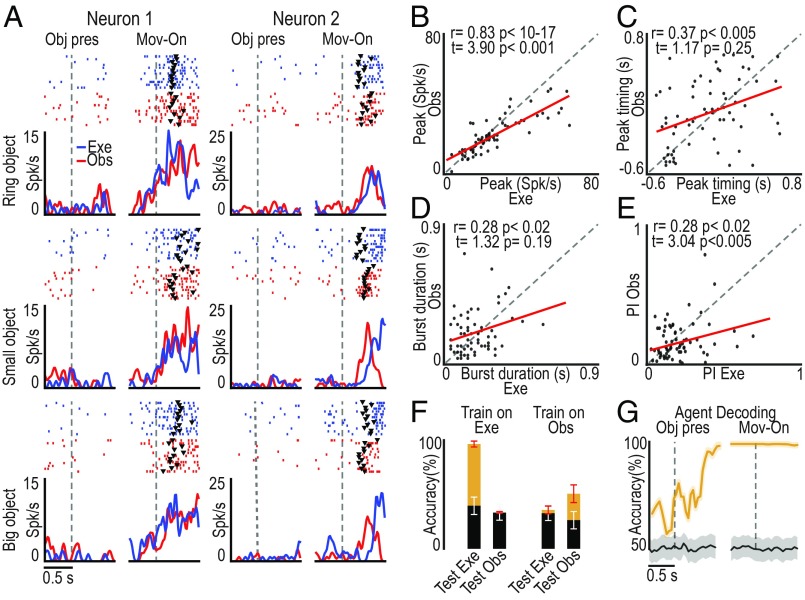
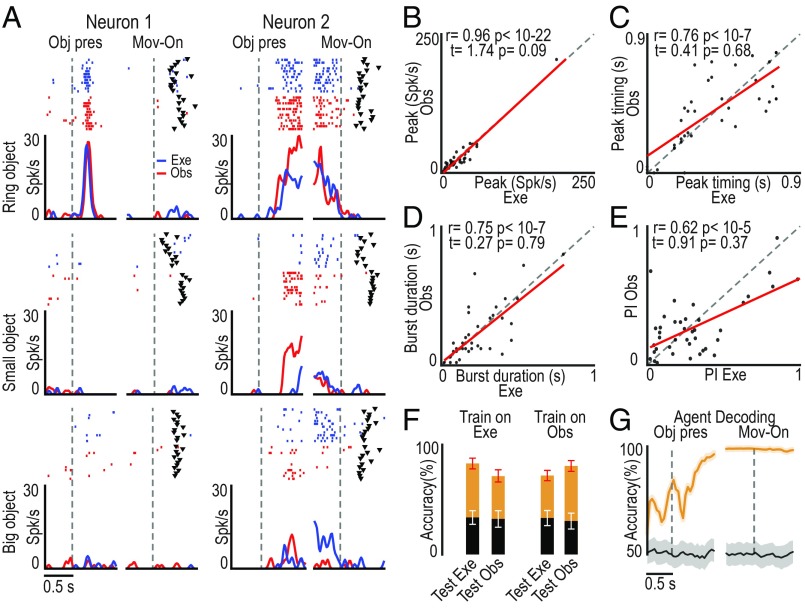
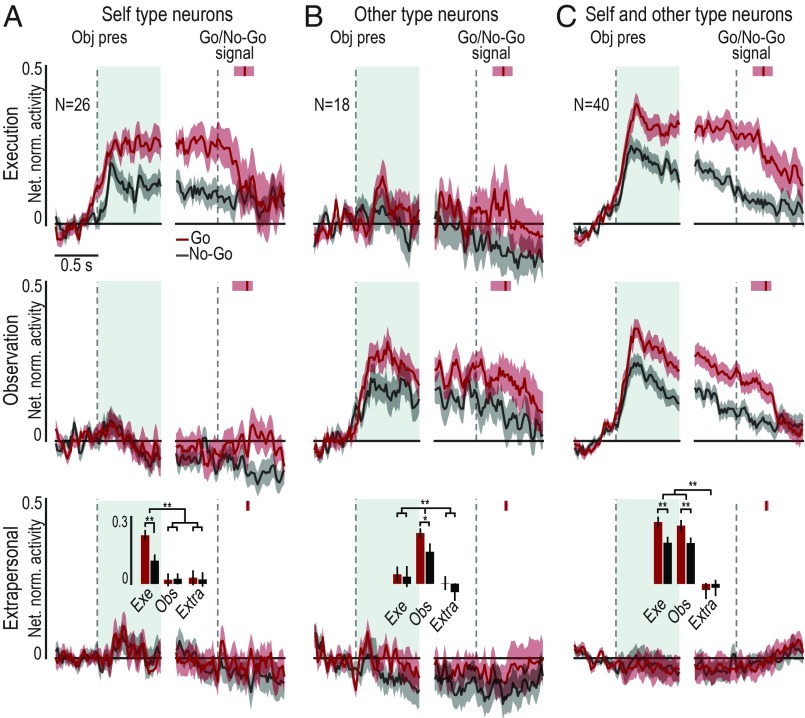
Information about objects around us is essential for planning actions and for predicting those of others. Here, we studied pre-supplementary motor area F6 neurons with a task in which monkeys viewed and grasped (or refrained from grasping) objects, and then observed a human doing the same task. We found "action-related neurons" encoding selectively monkey's own action [self-type (ST)], another agent's action [other-type (OT)], or both [self- and other-type (SOT)]. Interestingly, we found "object-related neurons" exhibiting the same type of selectivity before action onset: Indeed, distinct sets of neurons discharged when visually presented objects were targeted by the monkey's own action (ST), another agent's action (OT), or both (SOT). Notably, object-related neurons appear to signal self and other's intention to grasp and the most likely grip type that will be performed, whereas action-related neurons encode a general goal attainment signal devoid of any specificity for the observed grip type. Time-resolved cross-modal population decoding revealed that F6 neurons first integrate information about object and context to generate an agent-shared signal specifying whether and how the object will be grasped, which progressively turns into a broader agent-based goal attainment signal during action unfolding. Importantly, shared representation of objects critically depends upon their location in the observer's peripersonal space, suggesting an "object-mirroring" mechanism through which observers could accurately predict others' impending action by recruiting the same motor representation they would activate if they were to act upon the same object in the same context.
关于我们周围物体的信息对于规划动作和预测他人的动作至关重要。在这里,我们研究了辅助运动前区 F6 神经元,在一项任务中,猴子观察和抓取(或避免抓取)物体,然后观察人类执行相同的任务。我们发现了“与动作相关的神经元”,它们选择性地编码猴子自己的动作[自类型(ST)]、另一个代理的动作[他类型(OT)]或两者[自和他类型(SOT)]。有趣的是,我们发现“与物体相关的神经元”在动作开始前表现出相同类型的选择性:事实上,当视觉呈现的物体被猴子自己的动作(ST)、另一个代理的动作(OT)或两者(SOT)瞄准时,不同的神经元集放电。值得注意的是,与物体相关的神经元似乎信号自我和他人的抓握意图以及最有可能执行的抓握类型,而与动作相关的神经元则编码一种没有任何观察到的抓握类型特异性的一般目标达成信号。时间分辨的跨模态群体解码显示,F6 神经元首先整合关于物体和上下文的信息,生成一个代理共享的信号,指定物体将如何被抓取,并且在动作展开过程中,该信号逐渐转变为更广泛的基于代理的目标达成信号。重要的是,物体的共享表示严重依赖于它们在观察者的个人空间中的位置,这表明了一种“物体镜像”机制,通过该机制,观察者可以通过招募他们在相同的上下文和相同的物体上执行相同的动作时会激活的相同运动表示,准确预测他人即将采取的行动。