State Key Laboratory of Precision Measuring Technology and Instruments, Tianjin University, Tianjin 300072, China.
School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China.
Sensors (Basel). 2019 Mar 3;19(5):1083. doi: 10.3390/s19051083.
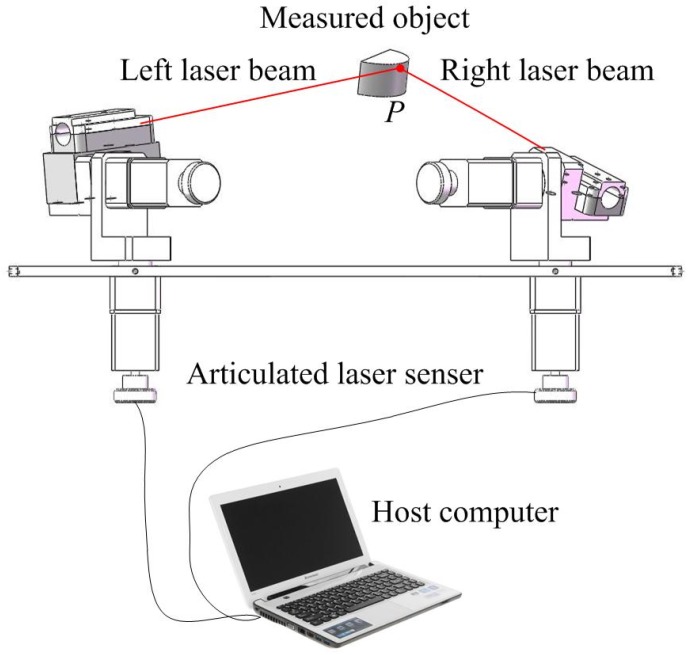
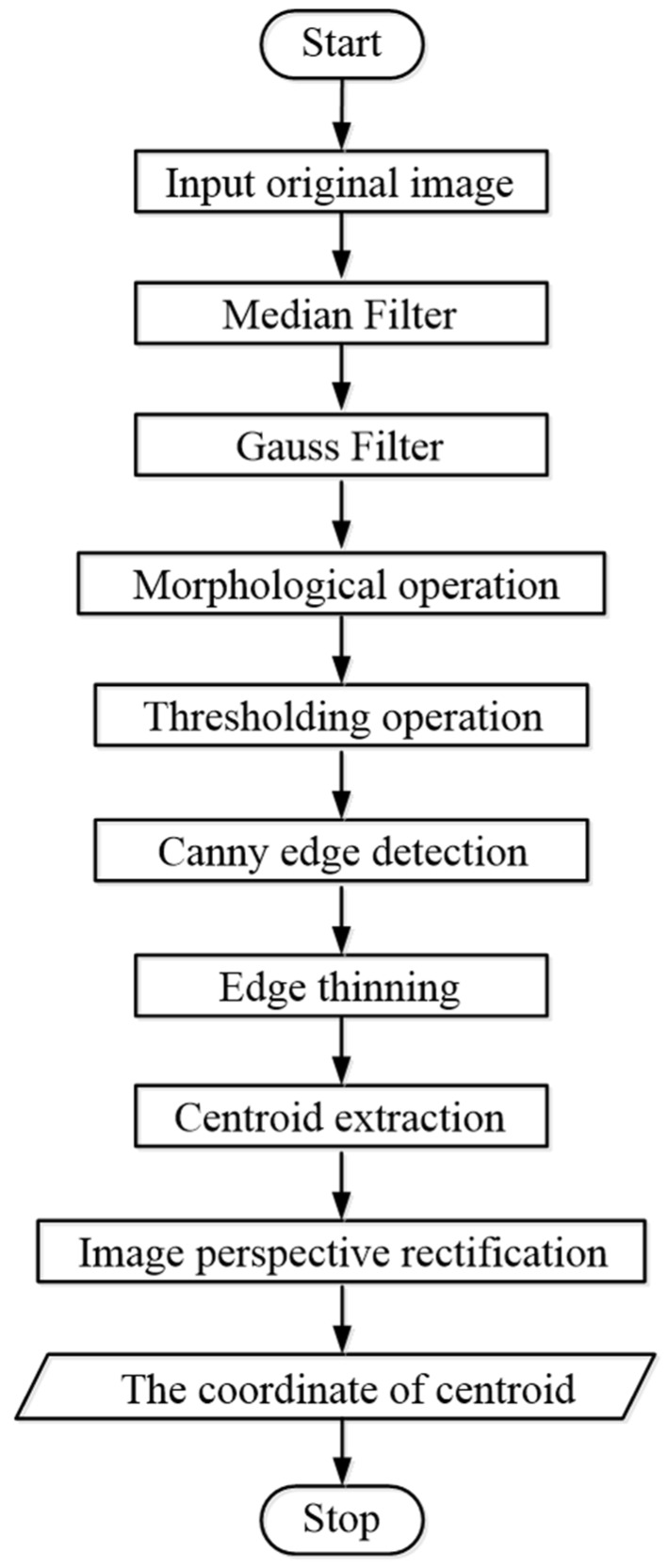
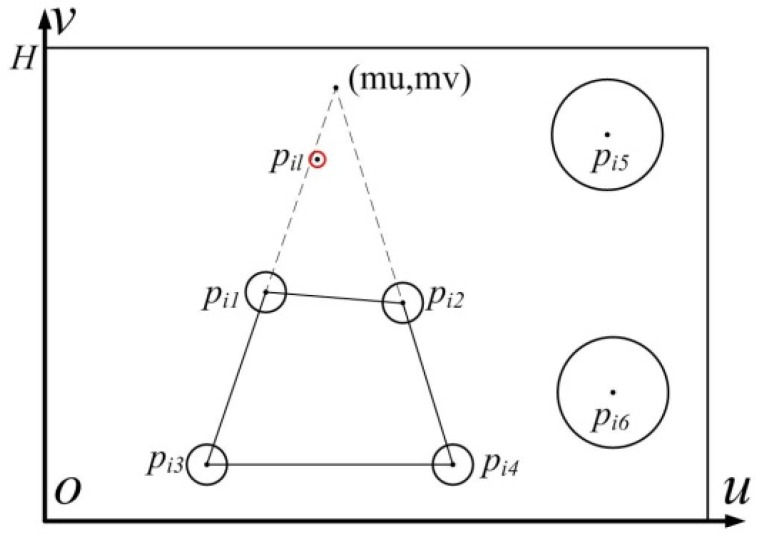
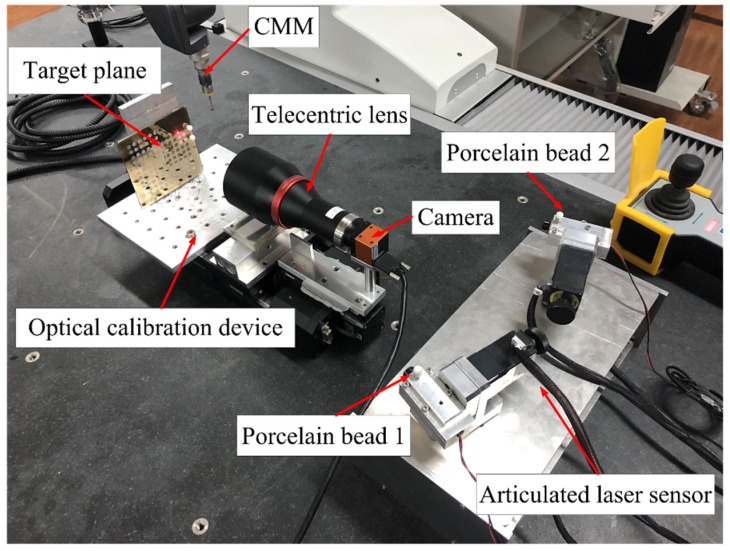
The articulated laser sensor is a new kind of trans-scale and non-contact measurement instrument in regular-size space and industrial applications. These sensors overcome many deficiencies and application limitations of traditional measurement methods. The articulated laser sensor consists of two articulated laser sensing modules, and each module is made up of two rotary tables and one collimated laser. The three axes represent a non-orthogonal shaft architecture. The calibration method of system parameters for traditional instruments is no longer suitable. A novel high-accuracy calibration method of an articulated laser sensor for trans-scale 3D measurement is proposed. Based on perspective projection models and image processing techniques, the calibration method of the laser beam is the key innovative aspect of this study and is introduced in detail. The experimental results show that a maximum distance error of 0.05 mm was detected with the articulated laser sensor. We demonstrate that the proposed high-accuracy calibration method is feasible and effective, particularly for the calibration of laser beams.
关节式激光传感器是一种新型的跨尺度、非接触测量仪器,适用于常规尺寸空间和工业应用。这些传感器克服了传统测量方法的许多缺陷和应用限制。关节式激光传感器由两个关节式激光传感模块组成,每个模块由两个旋转台和一个准直激光组成。三个轴代表非正交轴结构。传统仪器的系统参数校准方法不再适用。提出了一种用于跨尺度 3D 测量的关节式激光传感器的新型高精度校准方法。基于透视投影模型和图像处理技术,激光束的校准方法是本研究的关键创新点,并进行了详细介绍。实验结果表明,关节式激光传感器的最大距离误差为 0.05 毫米。我们证明了所提出的高精度校准方法是可行且有效的,特别是对于激光束的校准。